您的购物车目前是空的!
科罗拉多大学:气象雷达
原作者代码
https://gitee.com/tekdf/2024IEEERadarChallenge
研究团队
- Mateo Lovato
- Nick Leonard
- Varun Dwarakanath
概述
- 接收端采用 FMCW 双基相控阵
- 载波频率:10.0 GHz
- 发射功率:1 mW ( 0 dBm)
- 手机典型发射功率:1 W (30 dBm)
- 范围:1-10 米
- 发射天线:1×4 Vivaldi 阵列
- 半功率波束宽度:
- 方位角 35°
- 仰角 65°
- 半功率波束宽度:
- 接收天线:4×8 贴片阵列
- 半功率波束宽度:
- 方位角 13°
- 仰角 26°
- 半功率波束宽度:
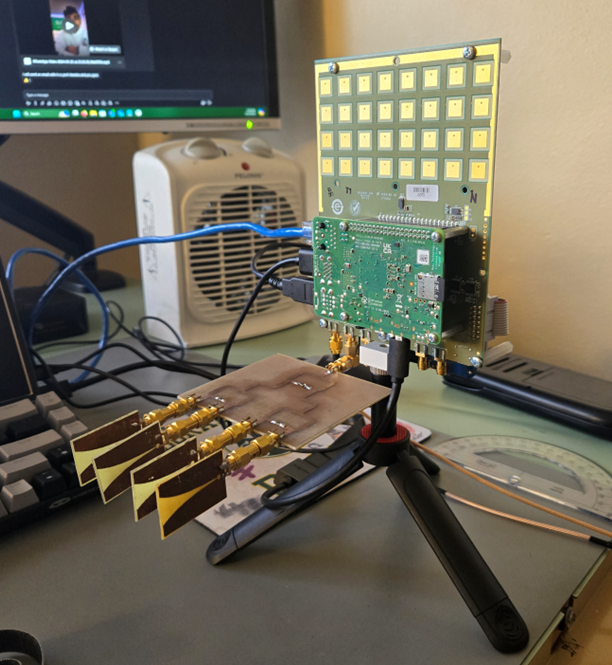
模拟降雨实验
- 改进的喷头,适用于大直径水滴
- 更高的反射率和差异反射率
- 水滴距离雷达约 3.3 米
- 减少干扰
- 大面积开阔区域
- 宽大的喷头安装座

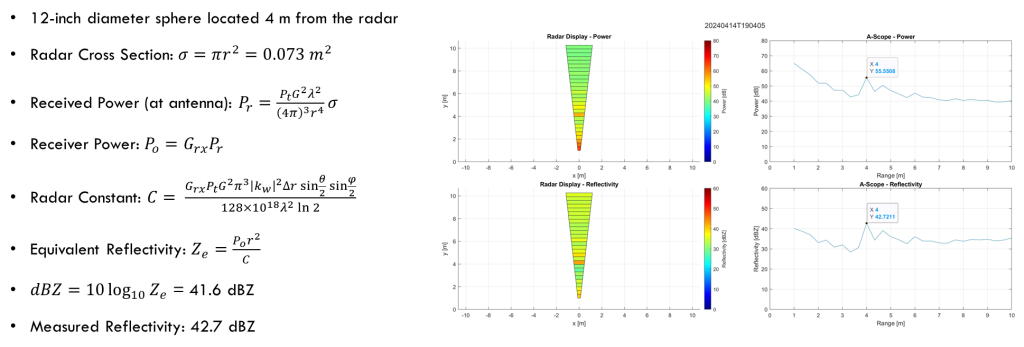
雷达校准

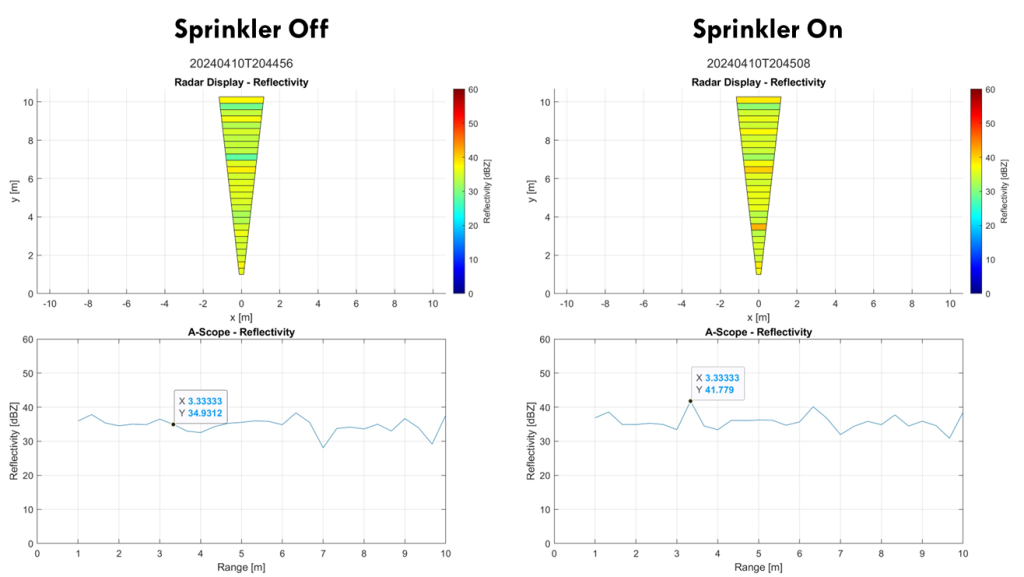
模拟雨水的反射率
- 垂直极化
- 雨幕距离雷达3.3米
- 喷头开启和关闭间隔12秒
- 平均超过20个脉冲
- 测量反射率:41.8 dBZ
- 相当于中到大雨
- 比背景噪声高10 dB
电子扫描

- 角反射器位于机械视轴上,距离雷达 9.6 米
- 反射率:50 dBZ
- 13 个转向角
- -78° 至 78°,增量为 13°
- 接收天线的半功率方位角波束宽度
- 扫描速率:1.0°/秒
- 实时 MATLAB 显示/记录
- 雷达显示(PPI 扫描)
- 瞬时 A 型示波器
- 机械视轴 A 型示波器
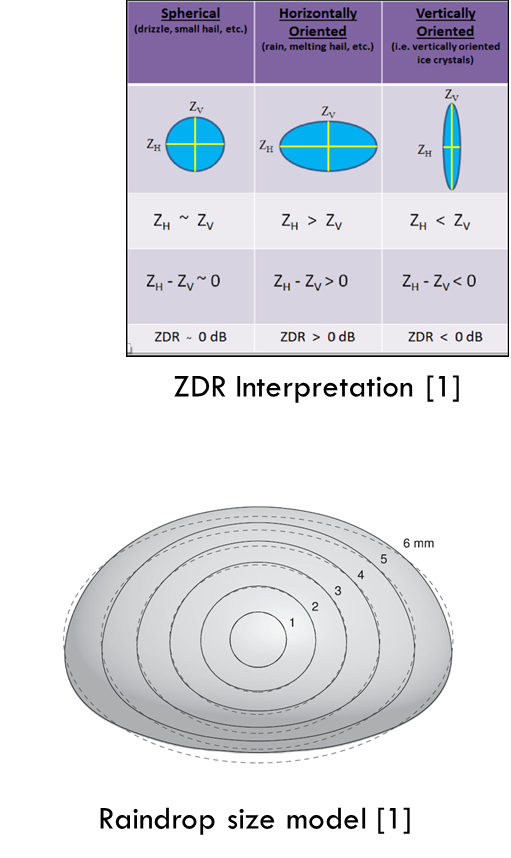
未来工作:差分反射率
𝑍𝐷𝑅=𝑑𝐵𝑍ℎ− 𝑑𝐵𝑍𝑣 [1]
可对毛毛雨、雨、雪、冰雹等进行分类。
雨的 ZDR 通常为 0 到 5
0 代表小雨,5 代表大雨
当前 ZDR 测量中的误差由以下原因造成:
非对称的 Tx/Rx 扇形波束
极化之间的集合间隔数分钟
单极化天线 – 雷达必须手动旋转
未来实施方案
双极化 Tx,带 X 波段喇叭
Rx,带来自移相器的 4×4 阵列(禁用 4 列)
同时接收 H/V 极化
发表回复
要发表评论,您必须先登录。