您的购物车目前是空的!
华盛顿大学:使用 CN0566 进行 ISAR 成像
两名华盛顿大学的学生使用 X波段相控阵雷达套件 (CN0566) 构建了一套系统,用于生成近岸海事船舶(范围小于 1.8 公里,分辨率 0.3 米)的 ISAR 图像。对于初学者来说,CN0566 是一款教学用的相控阵雷达,允许使用真实的波束成形硬件进行项目开发(工作在 X 波段,频率约为 10.25 GHz)。
原作者代码
https://gitee.com/tekdf/mantis-2024-aess-challenge
原始论文
研究团队
- Nicole Pham
- Dylan Wesen
项目摘要
逆合成孔径雷达 (ISAR) 是一种利用雷达数据生成图像的技术。ISAR 与 SAR 的相似之处在于,它利用雷达与目标或场景之间的相对运动来形成大型合成孔径,从而实现精细的方位分辨率。SAR 和 ISAR 的不同之处在于,ISAR 使用固定雷达对运动目标进行成像,而 SAR 利用雷达运动对(通常)静止场景进行成像。SAR 通常可以利用机载传感器(例如 GPS 或 INS)对雷达平台进行运动估计,而 ISAR 必须使用各种信号处理技术来估计、补偿和利用目标运动。
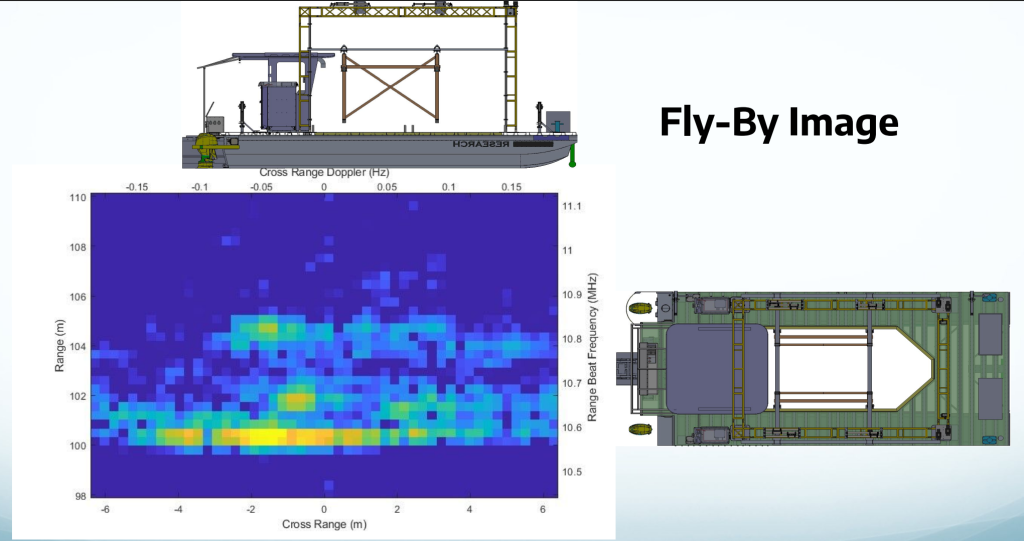
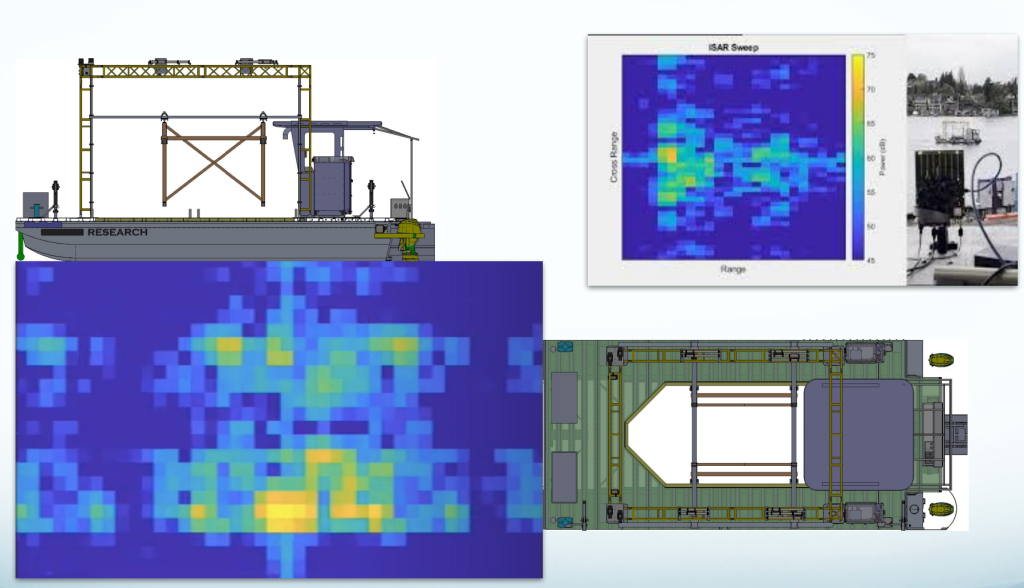
团队创建了一个可以放置在岸上的 ISAR 系统,它可以作为岸上团队观察水上交通的低成本监控系统。该系统相对于光学系统的优势在于,即使在能见度较差的条件下(例如雾天和黑暗),它也能正常工作。它还可以扩展为分类系统,识别被跟踪船只的类型。
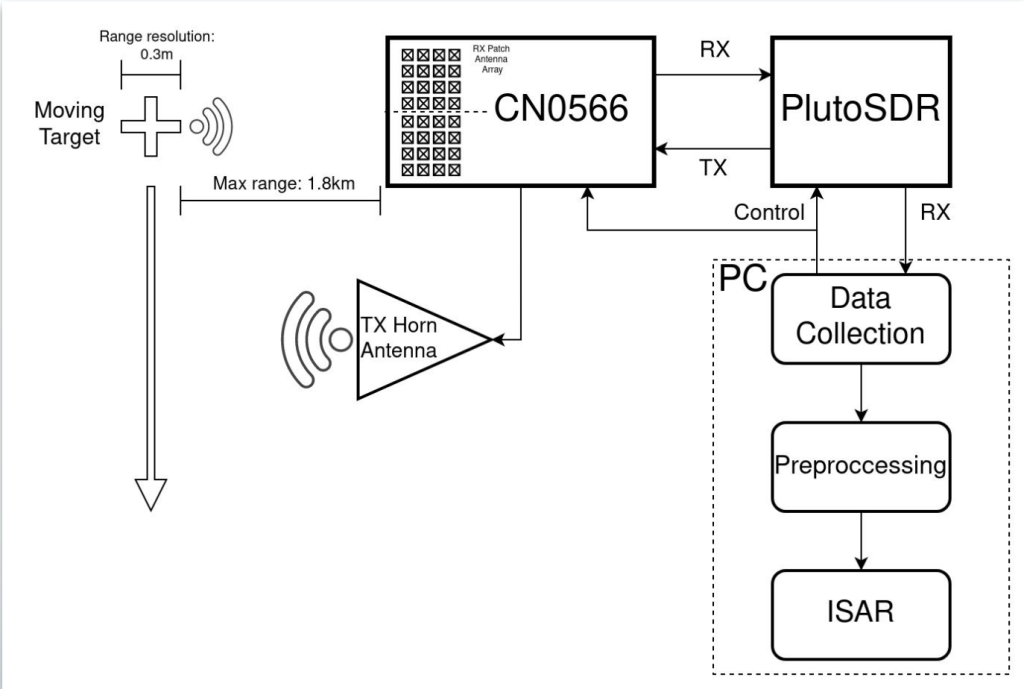
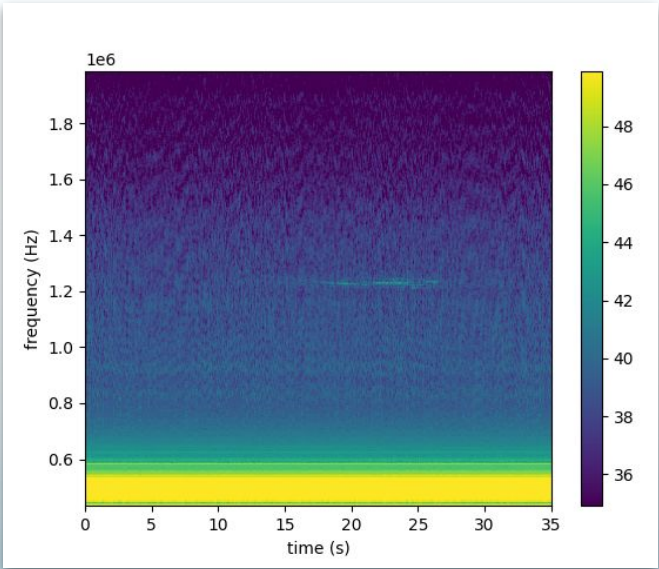
数据采集
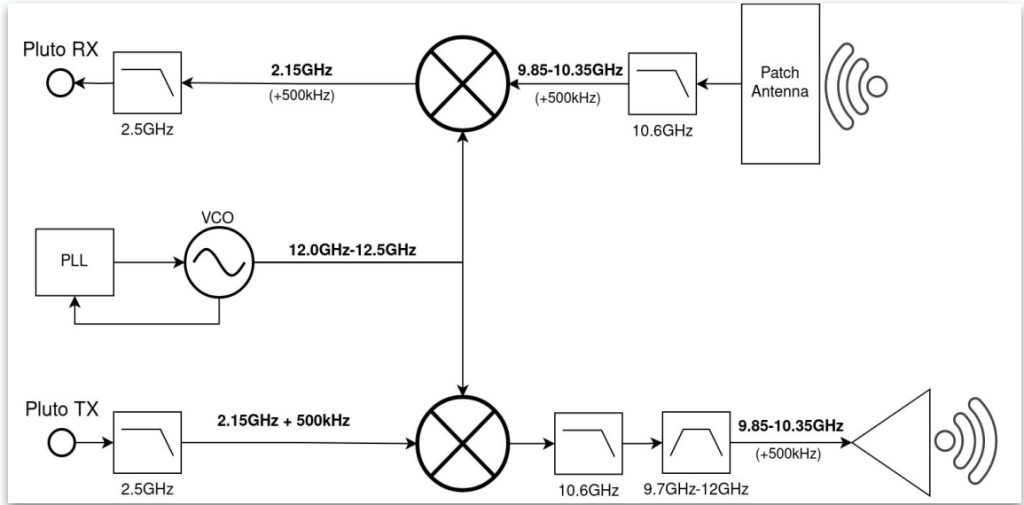
SDR 设置概要
- 采样率(Sample Rate):25Msps
- TX 和 RX LO:2.15GHz
CN0566 设置概要
- 本振(LO):12.0GHz
- 斜坡模式(Ramp Mode):连续锯齿波(Continuous Sawtooth)
- 线性调频带宽(Chirp Bandwidth):500MHz
- 每次采集的斜坡数量(Number of ramps per acquisition):3
- 斜坡持续时间(Ramp duration):600us
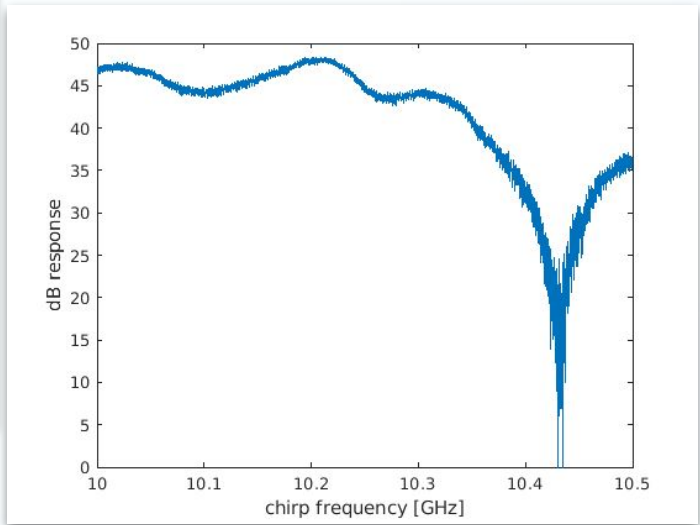
- 射频范围(RF range):9.85GHz-10.35GHz
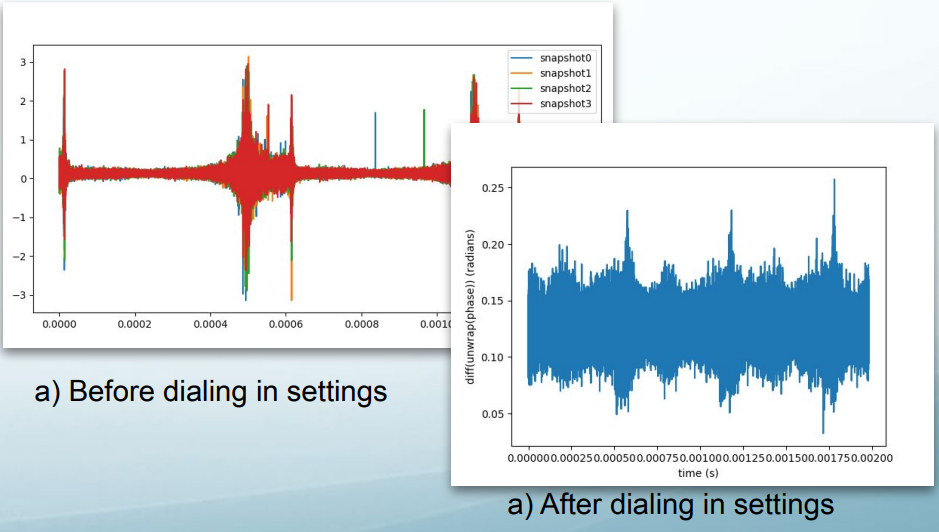
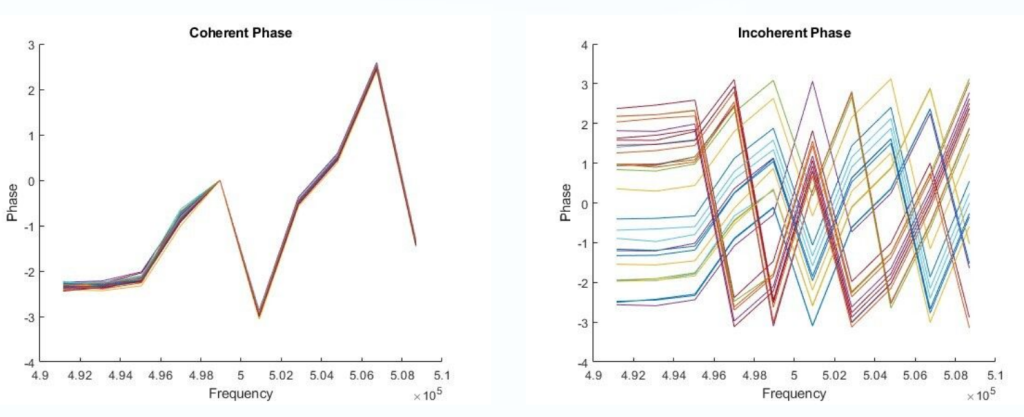
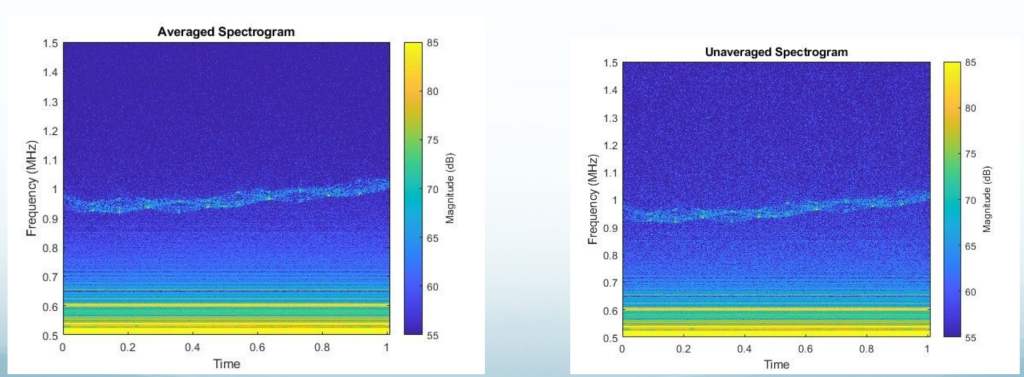
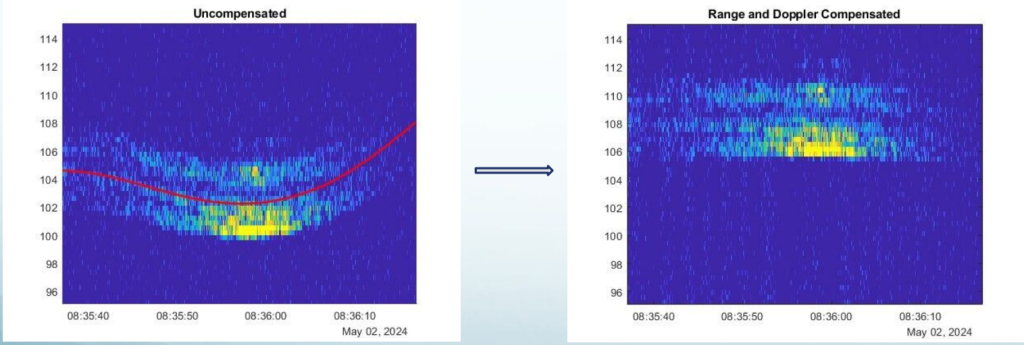
预处理
这些数据在用于 ISAR 之前仍需要进行一些校正。我们的预处理显著提高了我们解析目标的能力。
步骤
- 相位校正
- 窗口化
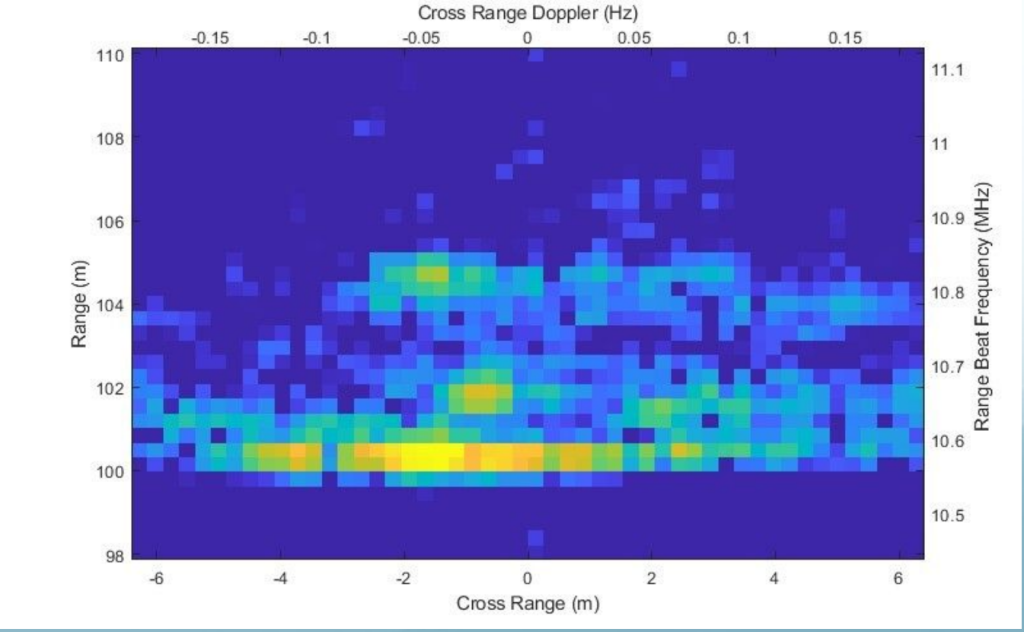
ISAR
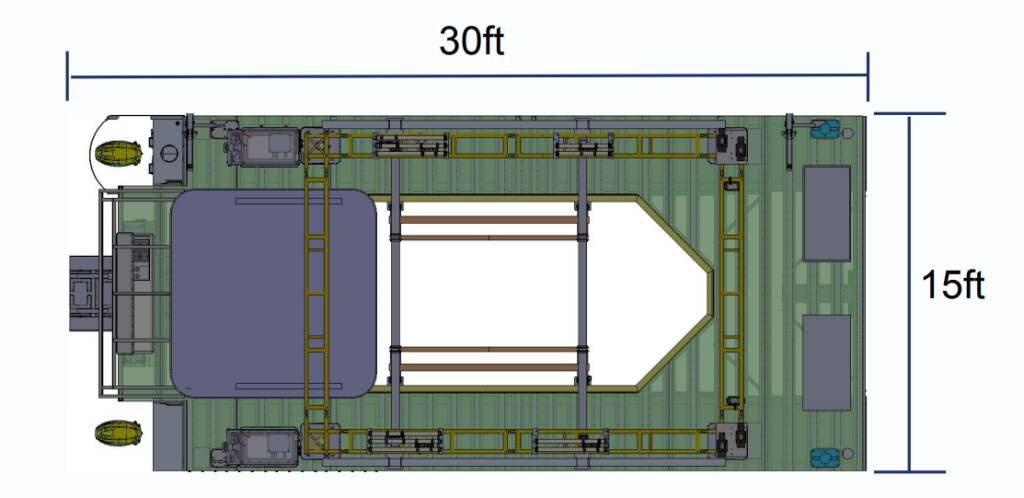
步骤 1:了解目标尺寸
步骤 2:找到频率带宽(范围)和角宽度(交叉范围)
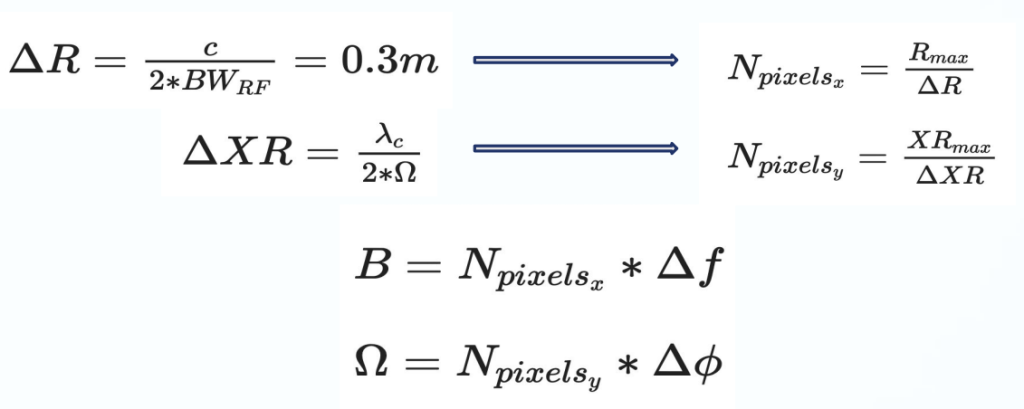
步骤 3:使用跟踪补偿预处理数据的范围(根据需要)
步骤 4:对背向散射数据进行二维傅立叶变换
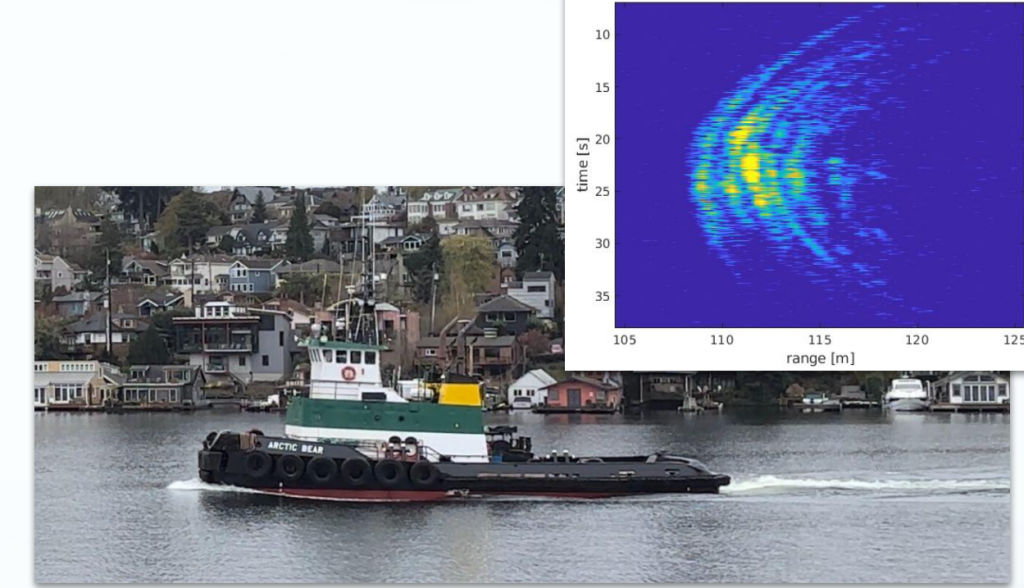
Fly-By Image
Fixed Rotation Image
未来工作
先进的运动补偿和自动对焦
- 先进的运动补偿和自动对焦
- 尾流传感
- 设备是X 波段和垂直极化
根据特性使其更适合水面扫描 - APL 在波浪重建和尾流传感研究方面拥有丰富的经验
- 设备是X 波段和垂直极化
- 使用机器学习对 ISAR 图像进行分类
- 船舶识别
- 特征识别
发表回复
要发表评论,您必须先登录。