您的购物车目前是空的!
标签: CN0566
-
相控阵天线波束图样(第一部分):线性阵列的波束特性与阵列因子
引言
随着数字相控阵技术在商用、航空航天及国防等领域的广泛应用,许多工程师正在参与其不同子系统的设计工作,但对相控阵天线的理解却相对有限。尽管相控阵天线的设计理论已经经过数十年的充分发展,但现有的大部分文献主要面向精通电磁数学的天线工程师。如今,随着相控阵系统中混合信号与数字模块比例的不断提升,越来越多的工程师亟需一种更直观的方式来理解相控阵天线的波束图样。
事实上,相控阵天线的行为与混合信号和数字工程师日常处理的离散时间采样系统之间存在诸多类比关系。这一系列文章并非旨在将读者培养成天线设计专家,而是为了帮助那些负责相控阵系统中某个子系统或组件的工程师,建立其工作对整体天线波束图样影响的可视化理解。
波束方向控制
首先,我们来看一个关于相控阵波束指向的直观示例。图 1 展示了一个简单的情形:一列四个天线单元从两个不同方向接收到入射波前。在接收路径中,每个天线单元之后均施加了一个固定时间延迟,然后将四路信号相加。
在图 1a 中,所施加的延迟恰好补偿了波前到达各个天线单元的时间差。因此,这种延迟使得四个信号在合并点处相位对齐,形成相干叠加,从而在合成器输出端得到较强的信号。
而在图 1b 中,同样的时间延迟被应用于另一种情形——此时波前垂直入射至天线阵列。由于延迟与波前几何不再匹配,导致四个信号在合并时相位错位,最终合成器输出信号幅度显著减弱。
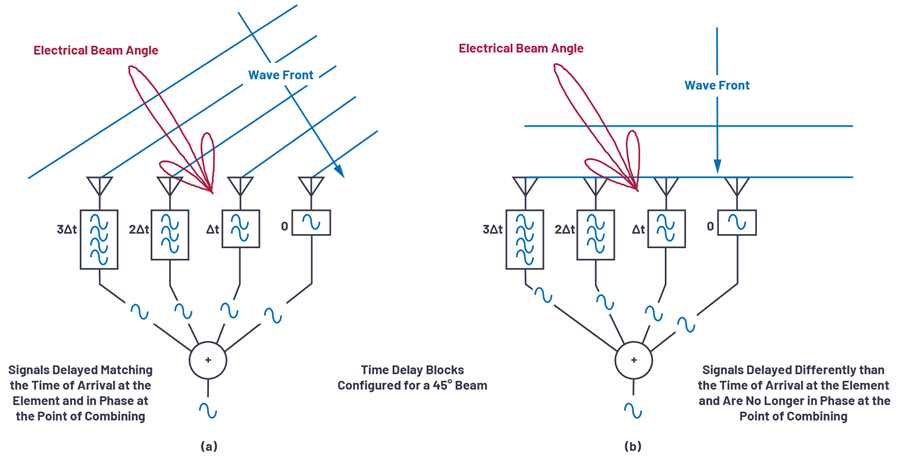
图 1. 波束指向角的理解
注:本图用于说明如何通过时间延迟控制实现相控阵波束在空间中的指向。通过匹配或错配波前到达各天线单元的时间差,可以控制输出信号的相干叠加或相位抵消,从而实现对波束方向的精确操控。
在相控阵系统中,“时间延迟”是实现波束指向控制时的可量化参数。然而,在实际应用中,这种时间延迟常常通过“相位移”来模拟,这是目前许多实现方案中更常见也更实用的方法。关于时间延迟与相位移之间的影响差异,我们将在后续关于“波束偏频(Beam Squint)”的章节中详细探讨。但在此之前,我们先来看一个基于相位移的波束控制实现,并推导其相应的波束指向计算公式。
图 2 展示了采用相移器(而非时间延迟)的相控阵系统结构。需要特别说明的是,我们将波束零向(boresight)方向(θ = 0º)定义为垂直于天线阵列平面的方向。正角度 θ 表示波束向右偏离波束零向,负角度则表示向左偏离。
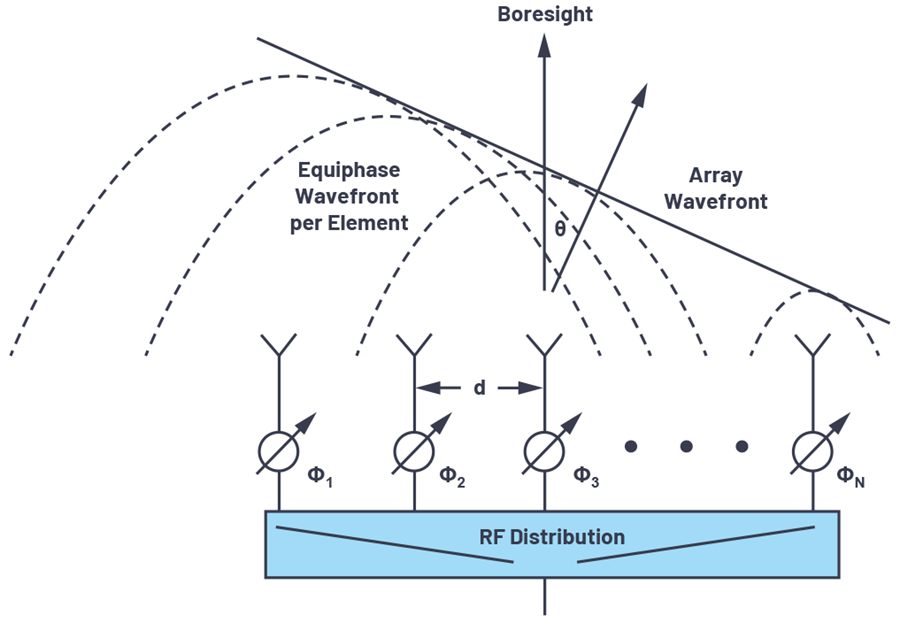
图 2. 使用射频相移器的相控阵原理示意图
注:本图展示了通过射频相移器实现波束控制的典型结构。各天线单元前加入可调相位器,通过调整相位差,实现对阵列波束方向的电子扫描(波束赋形)。这种实现方式在实际系统中比精确的时间延迟更具工程可行性,尤其适用于窄带或准窄带系统。
为了直观理解实现波束指向所需的相位移,可以如图 3 所示,在相邻的天线单元之间构造一组直角三角形。其中,ΔΦ 表示相邻天线单元之间所施加的相位差。
这种几何构造清晰地揭示了阵列结构、波束指向角(θ)与相位差(ΔΦ)之间的关系,为后续推导阵列因子和波束控制公式提供了直观基础。
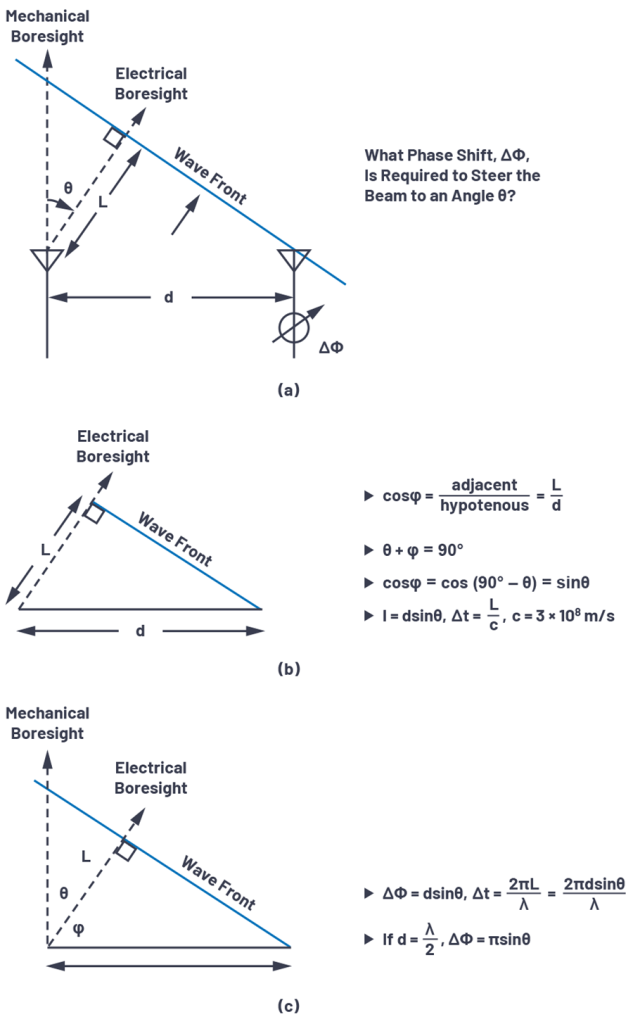
图 3. 相位移 ΔΦ 与波束指向角的关系推导
本图通过几何构造展示了相控阵波束扫描过程中,相邻天线单元之间的相位差 ΔΦ 如何随着波束扫描角度 θ 变化而变化。该推导是实现电子波束控制(电子扫描)中相移量设计的基础,对阵列因子的精确计算具有重要意义。
图 3a 展示了相邻天线单元之间的几何三角关系,其中每个单元之间的间距为 ddd。当前波束偏离波束零向(boresight)指向一个角度 θ,而该角度与地平线之间的夹角为 φ。
在图 3b 中可以看到,角度之间满足以下关系:
θ + φ = 90°
这使我们能够计算波传播路径的差值L ,其表达式为:
L = d × sin(θ)
波束偏转所需的时间延迟,等于波前穿越这段距离L 所需的时间。如果我们将L 看作波长的一个比例关系,那么完全可以用相位延迟来替代这一时间延迟。
因此,相位差 ΔΦ 相对于波束偏转角 θ 的数学表达式可由图 3c 导出,并在公式(1)中给出。

如果天线单元之间的间距正好为信号波长的一半,则该公式可进一步简化为:

让我们用这些公式来计算一个示例。假设两个天线单元之间的间距为 15 毫米,若一个 10.6 GHz 的波前以相对于机械波束零向 30º 的角度入射,那么这两个天线单元之间的最佳相位差是多少?
- θ = 30º = 0.52 rad
- λ = c/f = (3 × 108 m/s)/10.6 GHz = 0.0283 m
- ∆Φ = (2π × d × sinθ)/λ = 2π × 0.015 × sin(0.52)/0.0283 m = 1.67 rad = 95º
因此,如果波前的入射角为 θ = 30º,那么只需将相邻天线单元的相位偏移 95º,即可使两个单元的信号实现相干叠加,从而在该方向上最大化天线增益。
为了更好地理解相位偏移如何随波束指向角(θ)变化,这些公式在图 4 中针对不同条件进行了绘图。从这些图中可以得出一些有趣的观察结论。
当阵元间距为 d = λ/2 时,在波束零向附近,相位偏移与波束方向之间的斜率约为 3:1,这正对应于公式(2)中的 π 系数。在这种情况下,相邻阵元之间的 180° 相位差理论上可以实现 90° 的波束方向偏转。尽管在实际中由于天线单元方向图的影响无法完全达到这一理想效果,但这些公式展示了理论上的最佳状态。
需要注意的是,当 d > λ/2 时,无论相位偏移量是多少,都无法实现完整的波束方向扫描。后文我们将看到,这种情况会导致天线方向图中出现栅瓣(grating lobes),而图中所示曲线正是这种异常情况的初步迹象。
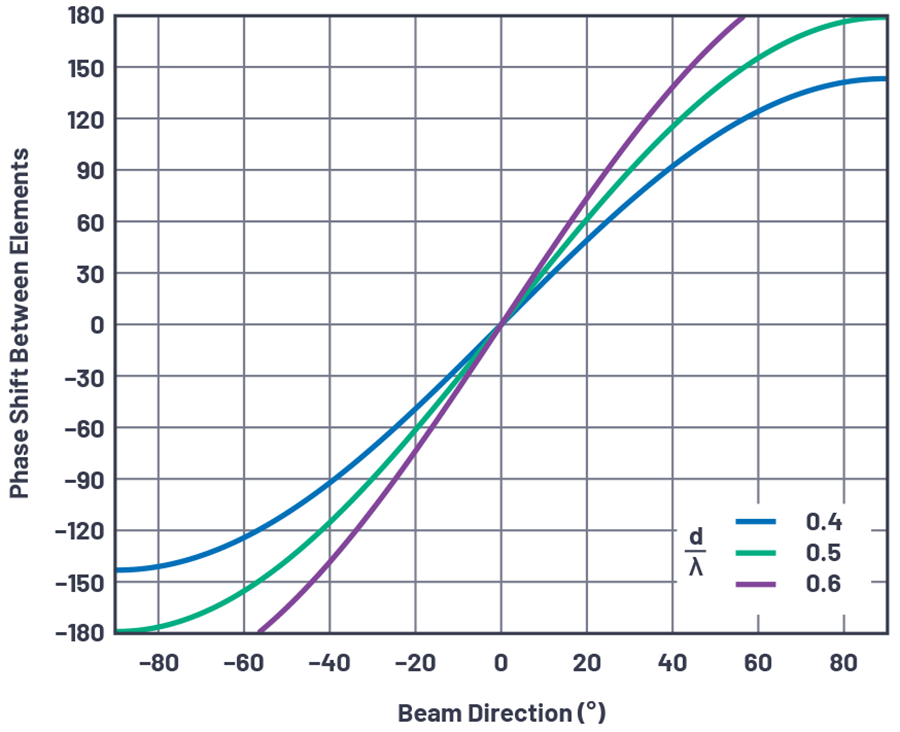
图 4. 不同 d/λ 情况下,相邻阵元之间的相位差 ΔΦ 与波束指向角 θ 的关系
本图比较了三种阵元间距(d/λ)设置下,所需相位差 ΔΦ 随波束扫描角度 θ 的变化情况,用以分析波束控制能力与可能出现的副瓣现象(如栅瓣)。
均匀间距的线性阵列
前文推导的公式仅适用于两个天线单元的情况,然而实际的相控阵天线往往包含成千上万个单元,分布在二维平面上。但在本节中,我们仅考虑一维情形,即线性阵列。
线性阵列指的是在一个方向上由多个天线单元组成的阵列,其在垂直方向上只有一个单元宽度,总共包含 N 个阵元。虽然阵元间距可以变化,但在大多数应用中通常采用均匀间距。因此,本文设定相邻单元之间的间距为统一的常数 d(如图 5 所示)。
尽管这是对实际阵列结构的简化建模,但这种均匀间距线性阵列为我们理解在不同条件下天线方向图的形成机制提供了基础。我们还可以将这些线性阵列的基本原理进一步推广,用于分析和理解二维阵列结构。

图 5. 均匀间距的线性阵列(N = 4)
注:本图展示了一个由 4 个天线单元组成的线性阵列,其中所有单元之间的间距均为常数 d。这是分析阵列因子和波束形成特性的基本结构模型。
近场与远场
近场与远场
那么,如何将前面针对 N=2线性阵列所推导的公式,扩展应用到一个包含 N=10, 000 个天线单元的线性阵列上呢?此时的挑战在于:对于这样一个大规模阵列,如图 6 所示,每个天线单元指向波前的角度都会略有不同,因为波前不再是平面波,而更接近球面波。
在这种情况下,我们就需要区分近场(Near Field)与远场(Far Field)。在远场条件下,波前可以被视为平面波,阵列中所有单元的入射角一致,因此前述相位推导仍然成立。而在近场中,波前具有曲率,不同单元接收到信号的方向和路径长度均不相同,这使得远场简化模型失效。
图 6 展示了一个典型场景,其中大规模阵列面对的是一个球面波前,反映出波束指向计算在近场条件下的复杂性。
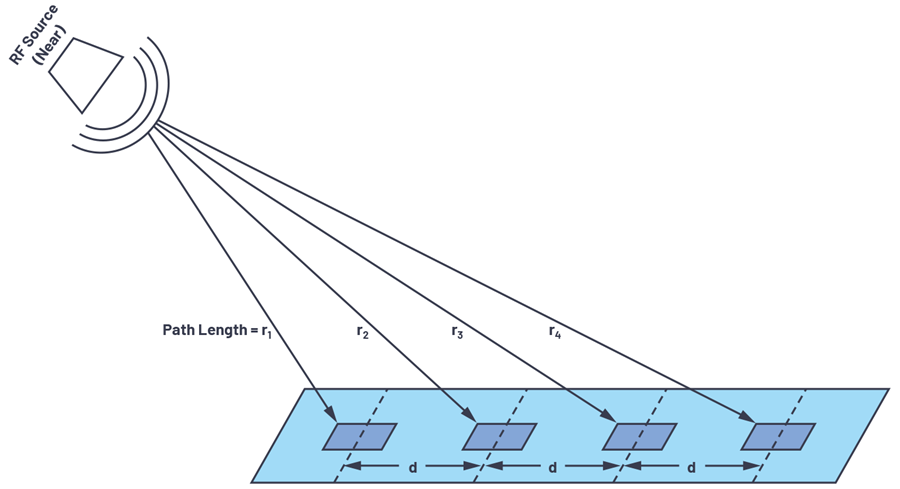
图 6. 位于线性阵列近旁的射频信号源
本图展示了一个射频信号源位于天线线性阵列的近场区域,此时波前呈现球面特性。不同天线单元接收到的信号方向与传播路径长度存在差异,无法简单使用远场平面波假设进行建模与计算。
当射频信号源距离天线较近时,每个阵元接收到的入射角都不相同,这种情况被称为近场(Near Field)。在近场条件下,我们可以逐个计算所有阵元的入射角,有时在天线测试和校准过程中必须这么做,因为测试环境空间有限,无法满足远场条件。
但如果我们假设射频信号源足够远,就会进入 远场(Far Field) 条件,此时所有阵元接收到的波前近似为平面波,对应的情形如图 7 所示。
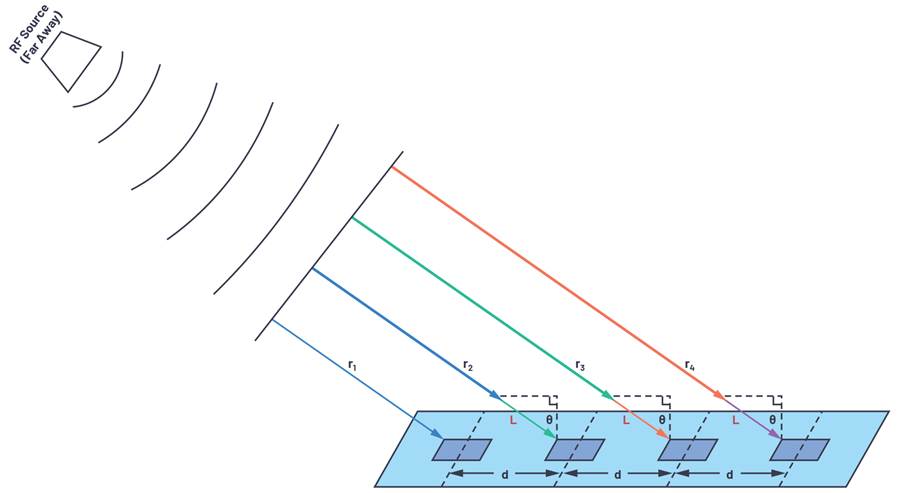
图 7. 位于线性阵列远处的射频信号源
本图展示了射频信号源处于远场条件下的情况。此时入射波前可近似视为平面波,阵列中所有天线单元接收到的信号方向一致,极大简化了波束形成和相位控制的计算过程。
当射频信号源距离足够远时,球面波前的半径非常大,导致波的传播路径近似为平行线。因此,所有天线单元接收到的波束入射角 θ 是相等的,且每个相邻单元之间的传播路径差可简化为:
L=d×sin(θ)
这大大简化了计算过程,并意味着:只要天线单元间距均匀,我们之前针对两个阵元推导的相位差公式同样适用于包含数千个阵元的大规模线性阵列。
但我们究竟何时可以采用远场假设?也就是说,“远”到底有多远?这个问题在某种程度上具有主观性,但通常情况下,远场条件被认为满足以下关系:
其中,D 表示天线阵列的孔径直径,对于均匀线性阵列而言可表示为:
D=(N−1)×d
其中:N:阵列中天线单元的数量;d:相邻单元之间的间距。
对于小尺寸阵列(即 D 较小)或低频信号(即波长 λ 较大),远场距离 R 也相对较小,远场假设容易满足。然而,对于大规模阵列(D 很大)或高频系统(λ 很小),满足远场条件的距离可能达到数公里之遥!
这会给天线的测试与校准带来极大困难。在这种情况下,通常需要使用更精确的近场模型进行建模与测量,并进一步将近场测试结果外推到远场使用场景中,以实现真实应用条件下的阵列性能验证。
天线增益、方向性与孔径
在深入讨论之前,我们有必要先对天线增益、方向性和孔径进行定义。首先澄清一下“增益(Gain)”与“方向性(Directivity)”的区别,因为这两个术语经常被混用。
天线增益和方向性都是相对于各向同性天线而言的比较——各向同性天线是一种理想天线,它在所有方向上均匀辐射。
方向性是指天线在某一特定方向上测得的最大发电功率 Pmax ,与在所有方向上平均辐射功率Pav的比值。当没有指定方向时,方向性可通过公式(4)计算得出。

方向性是一个非常有用的指标,用于比较不同天线的性能,因为它定义了天线聚焦辐射能量的能力。增益则具有与方向性相同的方向图特性,但增益还包含了天线的损耗因素。

Prad 是天线辐射的总功率,Pin 是输入到天线的功率,k 用于表示天线辐射过程中的损耗因子。
接下来,我们将考虑天线方向图作为三维方向的函数,以及方向性如何随着波束宽度变化而变化。
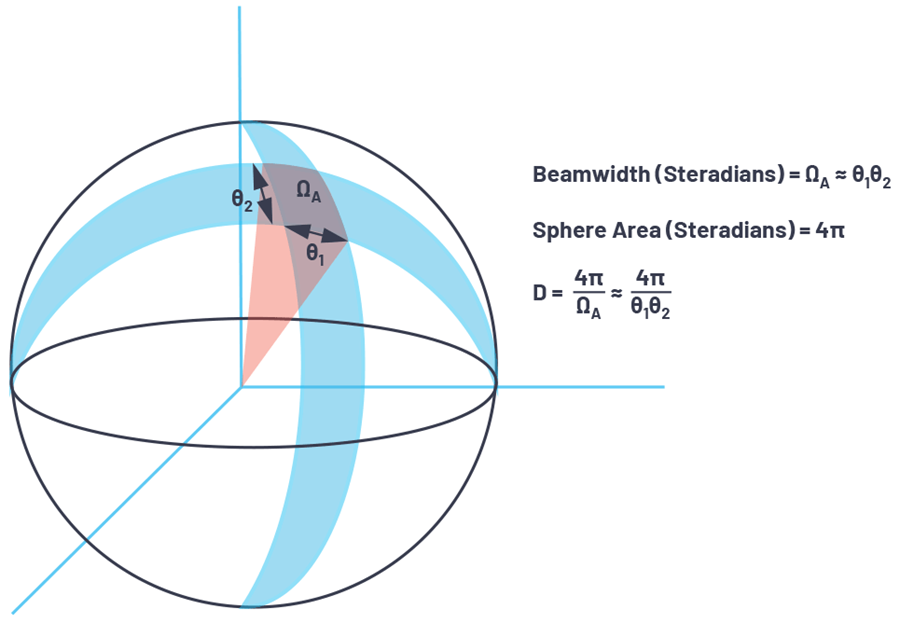
图 8. 投影到球面上的区域的三维视图
本图展示了天线方向图在三维球坐标中的可视化效果,用于表示某一方向上天线辐射能量的分布情况。该投影有助于理解方向性与波束宽度之间的空间关系。
一个球体的总表面积为 4π2,而球面上的面积以 立体角(steradian) 为单位进行定义,一个完整球面包含 4π 个立体角。因此,来自各向同性辐射源的功率密度为:

其单位为 瓦/平方米(W/m²)。
球面上的一个区域由两个角方向共同定义,在雷达系统中,这两个方向通常称为方位角(azimuth)和俯仰角(elevation)。波束宽度可分别表示为两个角度函数:θ₁ 和 θ₂,它们共同构成球面上的一个区域,记作ΩA。
Ωₐ 是以 立体角(steradian) 为单位的波束宽度,可近似表示为: ΩA ≈ θ1 × θ2.
将 ΩA视为球面上的一个面积后,方向性(Directivity)可以表示为:

我们要讨论的第三个天线术语是孔径(Aperture)。天线孔径表示接收电磁波的有效面积,并且与波长相关。
各向同性天线的孔径为:

由于增益是相对于各向同性辐射而言的,因此天线的有效孔径可表示为:

将这三个术语综合起来可以看出,增益可以看作是角度的函数,用于定义天线的辐射方向图,并考虑了天线的效率(或损耗)因素。
线性阵列的阵列因子(Array Factor)
此时,我们已经能够预测阵列各单元之间的最优时间延迟或相位差,以实现最大的天线方向性。但我们更希望能够理解并控制整个天线的增益方向图。这涉及两个主要部分:
首先是每个阵列单元本身的增益,称为单元因子(GE);
其次是我们通过波束赋形对阵列施加的控制,称为阵列因子(GA)。完整的阵列天线增益方向图是这两个因子的乘积,如公式(10)所示。

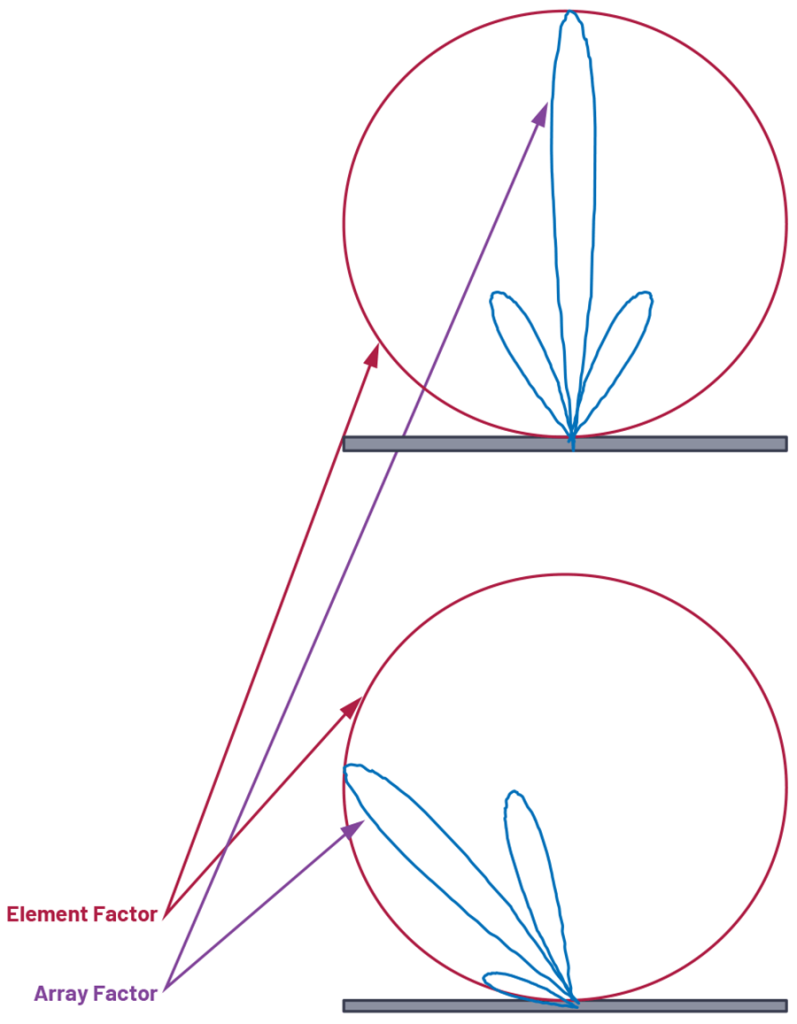
图 9. 单元因子与阵列因子。单元因子GE 是阵列中单个天线单元的辐射方向图,由天线结构的几何形状和构造决定,在运行过程中通常不会变化。了解单元因子非常重要,因为它会限制整个阵列的最大增益,尤其是在接近地平线的方向。但由于我们无法在电气上控制它,所以在增益建模中将其视为一个固定的影响因素。本文假设所有单元具有相同的单元因子。
因此,我们的关注点转向阵列因子 GA。阵列因子是根据阵列的几何结构(对于本文中的均匀线性阵列,指阵元间距 d)以及波束加权(振幅与相位)来计算的。对于均匀线性阵列,阵列因子的推导是比较直接的,但具体细节请参考本文结尾所列文献。
不同文献中,因对线性阵列参数的定义略有差异,阵列因子的表达式可能也略有不同。本文采用与图 2 和图 3 中定义一致的表达方式,以保持公式的一致性。
由于我们主要关注的是增益随角度的变化,因此通常更具指导意义的是绘制归一化后的阵列因子,即将最大增益归一化为 1。归一化后的阵列因子可表示为公式(11)。


我们已将波束指向角 θ0 表示为相邻单元间相位差 ΔΦ 的函数,因此也可以将归一化的天线因子表示为公式(12)。

阵列因子的计算通常假设以下条件成立:
- 阵列单元之间间距相等;
- 相邻单元之间具有恒定相位差;
- 所有单元具有相同的激励幅度。
接下来,我们使用上述公式绘制不同阵列规模下的阵列因子图。
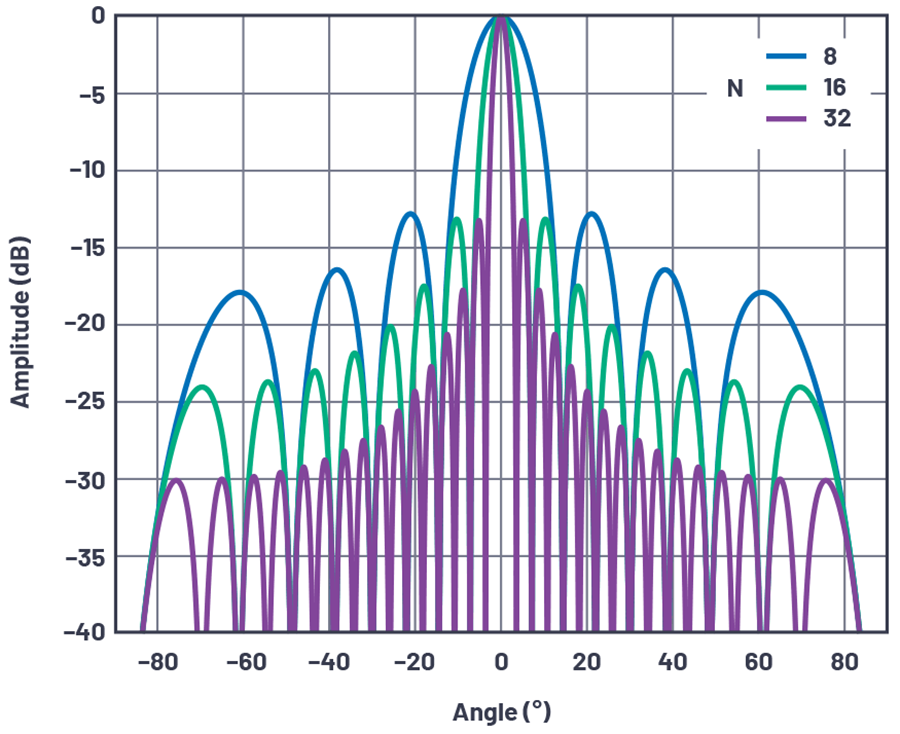
图 10. 波束零向下(boresight)线性阵列的归一化阵列因子,元素间距为 d = λ/2,元素数量分别为 8、16 和 32。
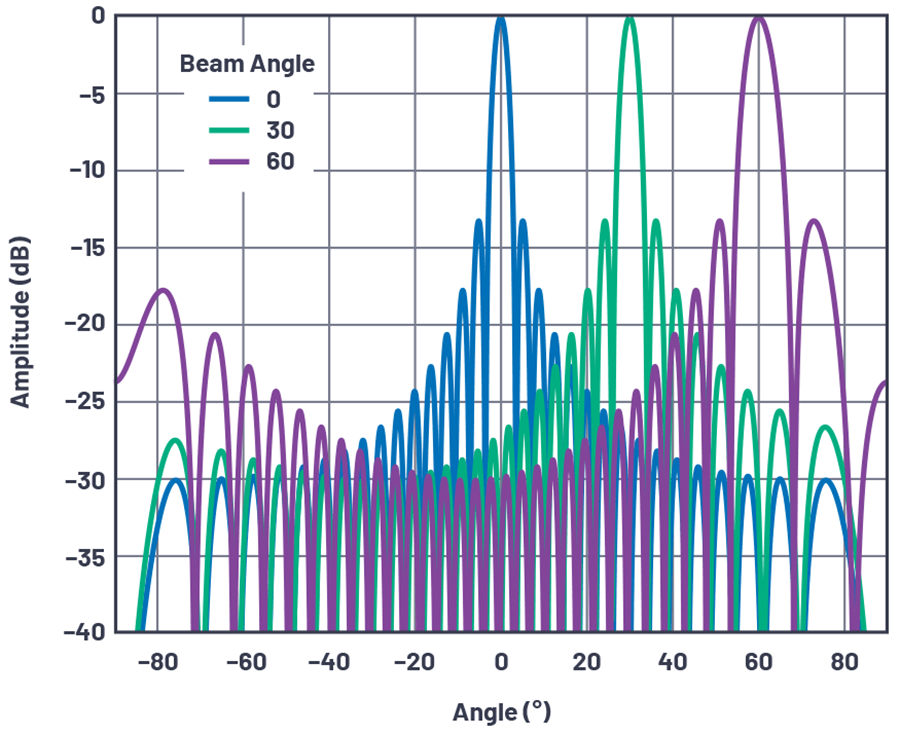
图 11. 32 单元线性阵列在多个波束指向角下的归一化阵列因子,元素间距为 d = λ/2。
从这些图中可得出如下观察结论:
- 第一个旁瓣电平约为 –13 dBc,与阵列因子中的 sinc 函数特性有关。旁瓣性能可通过对各阵元施加幅度加权(tapering)进行优化,后续章节将进一步探讨;
- 波束宽度随着阵元数量增加而变窄;
- 当波束扫描远离波束零向时,波束宽度变宽;
- 随着阵元数量增加,方向图中的零点数量也增加。
波束宽度(Beamwidth)
波束宽度是衡量天线角分辨率的重要指标。最常见的定义方式包括:
- 半功率波束宽度(HPBW, Half-Power Beamwidth):指主瓣峰值下降 3 dB 时,两侧的角度间隔;
- 零点间距(FNBW, First Null-to-Null Beamwidth):指主瓣两侧第一个零点之间的角度。
为获得 HPBW,如图 12 所示,我们从波束峰值下降 3 dB,并测量两侧的角距离。
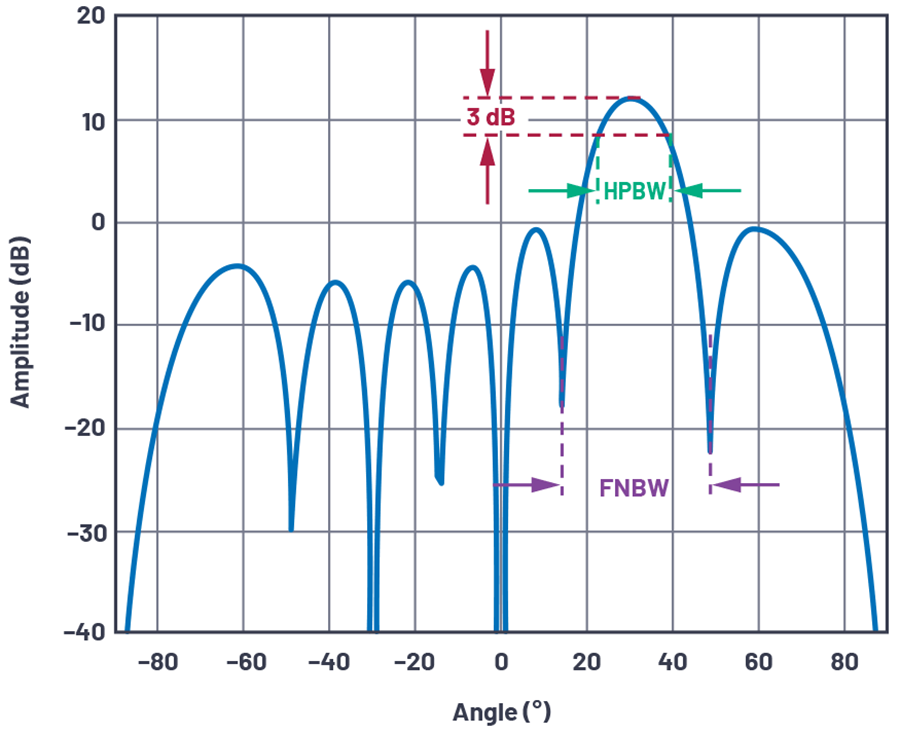
图 12. 天线波束宽度定义(线性阵列参数:N = 8,d = λ/2,θ = 30°)
使用归一化后的阵列因子表达式,可通过将公式(3)设为半功率点(即 3 dB 或 1/√ 2)来求解 HPBW。我们设定:
- 波束零向 θ = 0°
- 阵元数 N = 8
- 阵元间距 d = λ/2

解出相位差 ΔΦ ≈ 0.35 rad。代入公式(1),求解对应的角度 θ:

该 θ 值是从波束峰值到 3 dB 点的角度,即 HPBW 的一半。将其乘以 2 即可得到完整的 3 dB 波束宽度,结果为:
HPBW ≈ 12.8°
同样地,若将阵列因子设为 0(即波束第一个零点),可以求得第一个零点间距(FNBW)为:
FNBW ≈ 28.5°(在上述条件下)
对于均匀线性阵列,HPBW 还可通过以下经验公式近似计算:

图 13 绘制了在 λ/2 元件间距条件下,多个元件数的波束宽度与波束角度的关系。
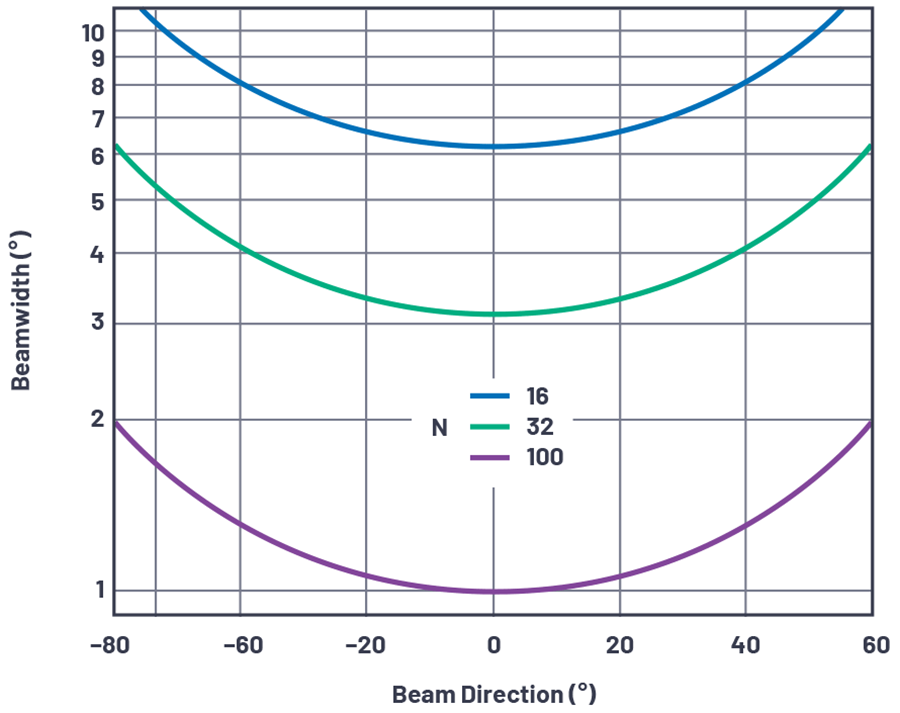
图 13. 波束宽度与波束指向角的关系图(阵元间距为 λ/2,阵元数为 16、32 和 100)
从图中可以得到以下几点工程观察:
- 若要实现 1° 的波束精度,则需要约 100 个阵元。若在方位角与俯仰角两个方向上都需实现 1° 精度,则需约 10,000 个阵元。但需注意,1° 精度仅在波束零向且接近理想条件下成立;若在大范围扫描角下维持 1° 精度,所需阵元数将进一步增加。这为大阵列系统的波束宽度设置了一个实际限制。
- 1000 阵元 是目前行业中较常见的配置。每方向 32 个单元构成总共 1024 个单元的阵列,在波束零向可实现小于 4° 的波束精度。
- 256 阵元 的阵列易于低成本量产,仍可实现小于 10° 的波束指向精度,这对于许多应用场景而言已足够。
- 此外还需注意,在所有这些情况中,当波束扫描至偏离中心 60° 时,波束宽度将增加一倍。这是由于公式中的 cos(θ) 项所致,体现了阵列在非垂直视角下的投影收缩效应——从侧角观察时,阵列的等效截面积变小,从而导致波束变宽。
组合单元因子与阵列因子
前一部分仅考虑了阵列因子。但要得到天线的总增益,还需要引入单元因子。图 14 展示了一个示例。在此示例中,我们采用一个简单的余弦形状作为单元因子,即归一化的单元增益 GE(θ)。在相控阵分析中,余弦衰减是一种常见的模型,如果考虑一个平坦表面,其可以可视化:在波束垂直方向(broadside)时,可见面积最大;而当角度偏离垂直方向时,可见面积按照余弦函数减少。
阵列因子 GA(θ) 采用了一个包含 16 个阵元的线性阵列,阵元间距为 λ/2,辐射方向图为均匀分布。总方向图是单元因子与阵列因子的线性乘积,因此在 dB 标度下可以将两者相加。
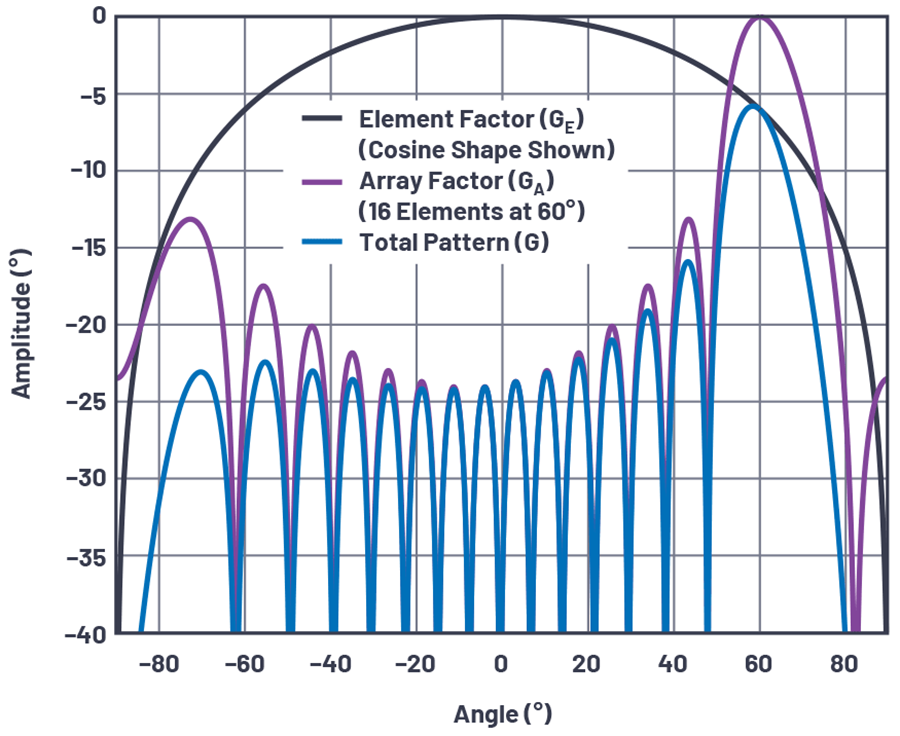
图 14. 单元因子与阵列因子结合形成总天线方向图。
当波束偏离波束零向时,有以下几点观察:
- 主瓣幅度按单元因子的速率下降;
- 波束零向上的旁瓣没有幅度衰减;
- 结果是阵列整体的旁瓣性能在偏离波束零向时退化。
天线图:笛卡尔坐标系与极坐标系
到目前为止,所使用的天线方向图都是在笛卡尔坐标系中绘制的。但在实际应用中,常常使用极坐标系绘制天线方向图,因为它们更能直观地表现能量从天线向外辐射的空间分布。图 15 是图 12 的重新绘制版本,但采用了极坐标系。需要注意的是,这些数据完全相同,一一对应——只是使用了极坐标系统重新绘图而已。
能够理解并可视化这两种坐标表示形式是非常有意义的,因为在文献中二者均有使用。在本文的大部分内容中,我们将继续使用笛卡尔坐标系表示方式,因为在该表示下更便于比较波束宽度和旁瓣性能。
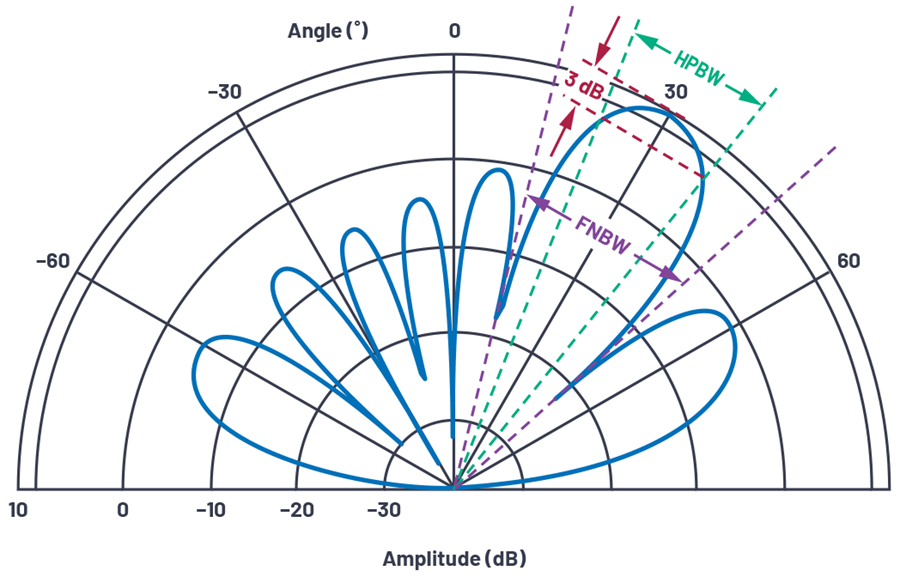
图 15. 极坐标下的天线方向性图(N = 8,d = λ/2,θ = 30°)
阵列互易性(Array Reciprocity)
截至目前,所有图示和文本内容均描述的是阵列接收信号的情形。那么,如果是一个发射阵列,情况会有什么不同呢?
幸运的是,大多数天线阵列具有互易性。因此,所有的图示、公式和术语在发射模式下与接收模式是相同的。有时,将波束视为由阵列“接收”更易于理解;而在某些情况下(例如分析栅瓣),你可能会发现将阵列“发射”一个波束的角度更加直观。
在本文中,我们通常将阵列描述为接收信号的模式。但如果你在视觉化上更容易理解发射形式,也完全可以将这些概念转化为发射端的情形来看待。
总结
至此,本系列的第一部分结束。我们介绍了相控阵实现波束指向的基本概念,推导并图示了实现波束控制所需的相位差计算公式。随后定义了阵列因子与单元因子,并分析了阵元数量、阵元间距及波束角度对天线响应的影响。最后,我们展示了笛卡尔坐标系与极坐标系下天线方向图的对比。
接下来的系列文章将进一步探讨相控阵天线方向图及其非理想因素。我们将研究天线加权(tapering)如何降低旁瓣、栅瓣是如何形成的,以及在宽带系统中相移与时间延迟之间的影响差异。系列的最后一部分将分析延迟模块的有限分辨率如何产生量化旁瓣,并降低波束分辨率。
参考文献
- Balanis, Constantine A. Antenna Theory: Analysis and Design. 第三版,Wiley,2005。
- Mailloux, Robert J. Phased Array Antenna Handbook. 第二版,Artech House,2005。
- O’Donnell, Robert M. “Radar Systems Engineering: Introduction.” IEEE,2012 年 6 月。
- Skolnik, Merrill. Radar Handbook. 第三版,McGraw-Hill,2008。
-
X波段相控阵雷达开发平台-设备高阶指南
欢迎
欢迎阅读本指南,本指南旨在让想从头开始配置设备的用户阅读,本指南作为一份指导,会帮你解决安装过程中的大部分问题,但是您仍然会遇到各种奇奇怪怪的问题,希望您可以在Google无果后与我们咨询问题。
本指南默认认为您具备Linux使用能力,具备Git等能力。
请自购一张SD卡,请勿使用套件中的SD卡,套件中的SD卡作为保底使用,当您无法完成本指南得时候,还是可以使用随货发出的保底SD卡正常使用。
制作SD卡
SD卡烧录工具:Raspberry Pi Imager
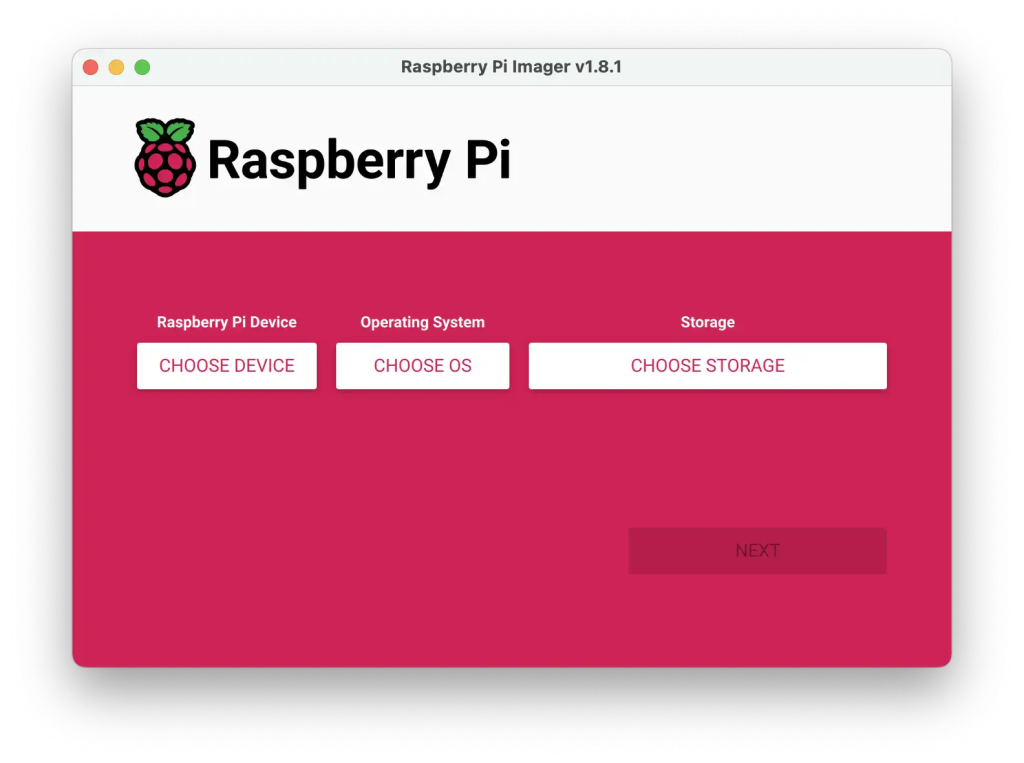
镜像下载地址:image_2023-04-02-ADI-Kuiper-full.zip
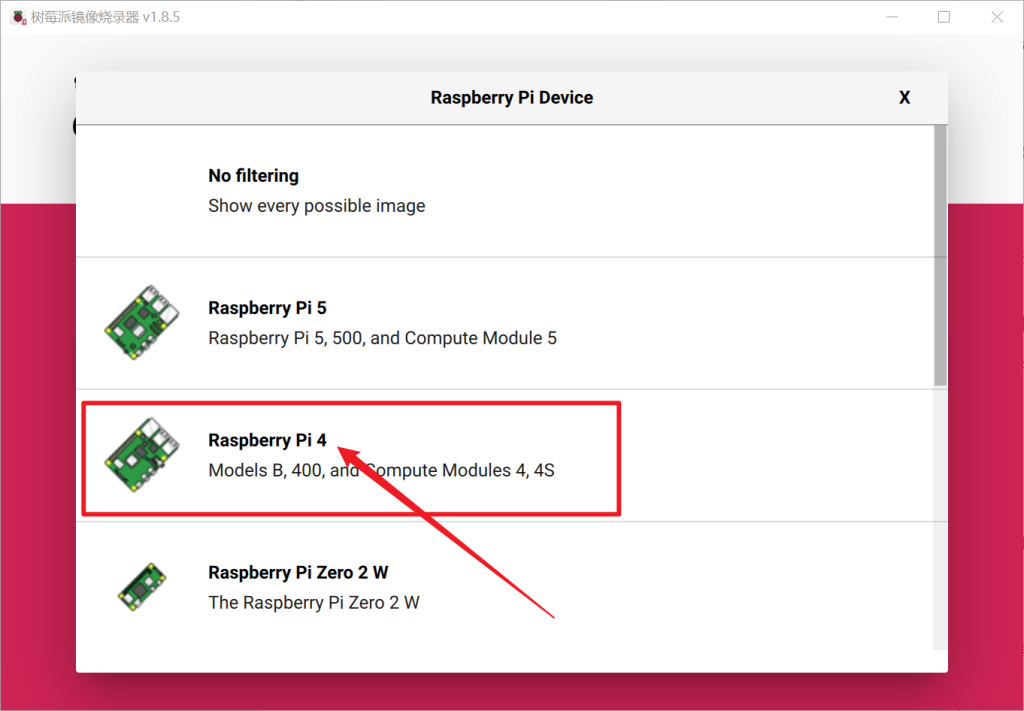
在使用的时候,选择设备中,选择树莓派4。
系统镜像请勿选择官方的,而是选择custom
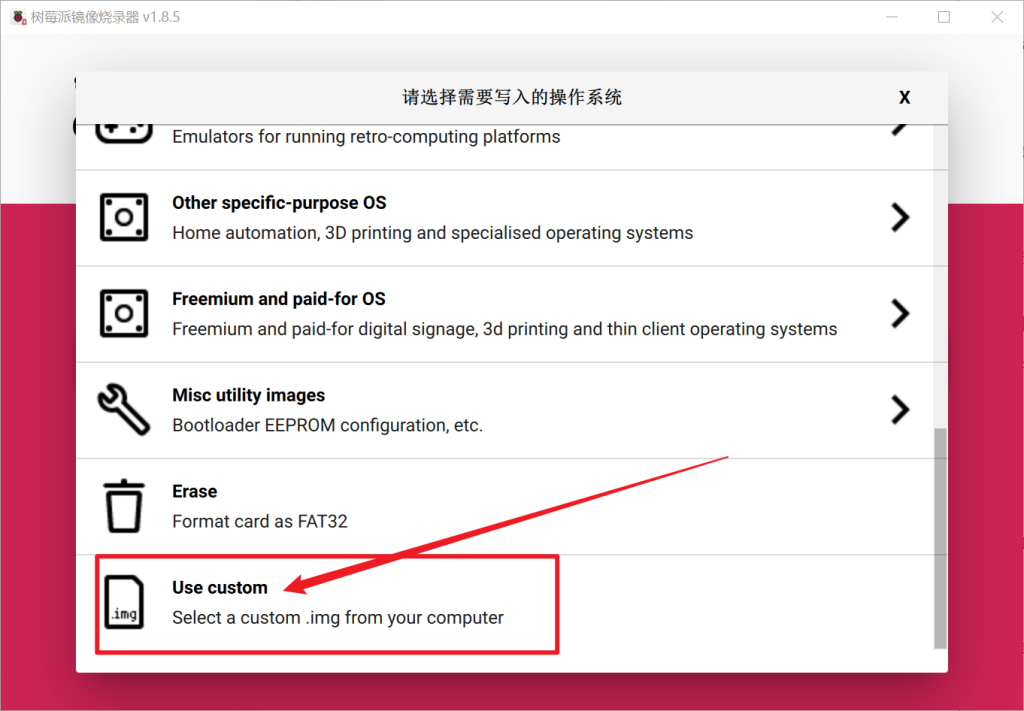
然后选择我们下载的镜像即可。接下来完成烧写之后,即可插入树莓派中,进行开机了。
用户名和密码
用户名和密码,可以用于后续的SSH远程连接。
用户名 密码 root analog analog analog 启用树莓派 VNC 服务
在终端输入以下命令进入配置界面。
sudo raspi-config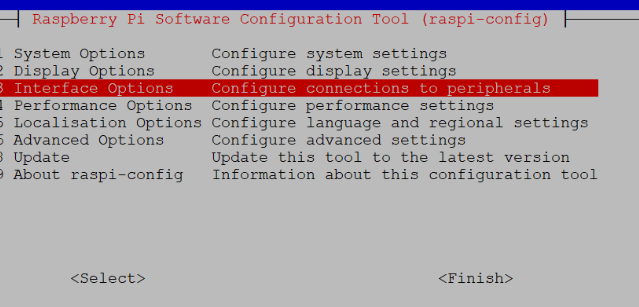
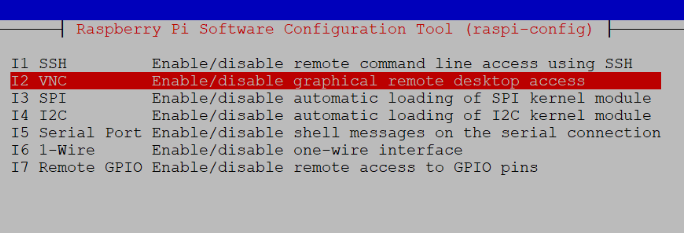
依次操作:Interfacing Options -> VNC -> Yes。之后系统会提示你是否要安装 VNC 服务,输入 y 之后回车,等待系统自动下载安装完成,一切顺利的话 VNC 服务就启动了!
安装NTP 模块
sudo apt-get install ntp使用命令重启ntp服务:
sudo service ntp restart检查当前的时间同步状态:
timedatectl status这个是为了后续的安装软件使用。
配置代理
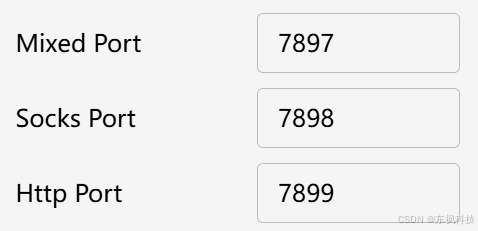
注意打开局域网连接

注意记住端口号
查看自己电脑的IP是多少,可以用CMD查看
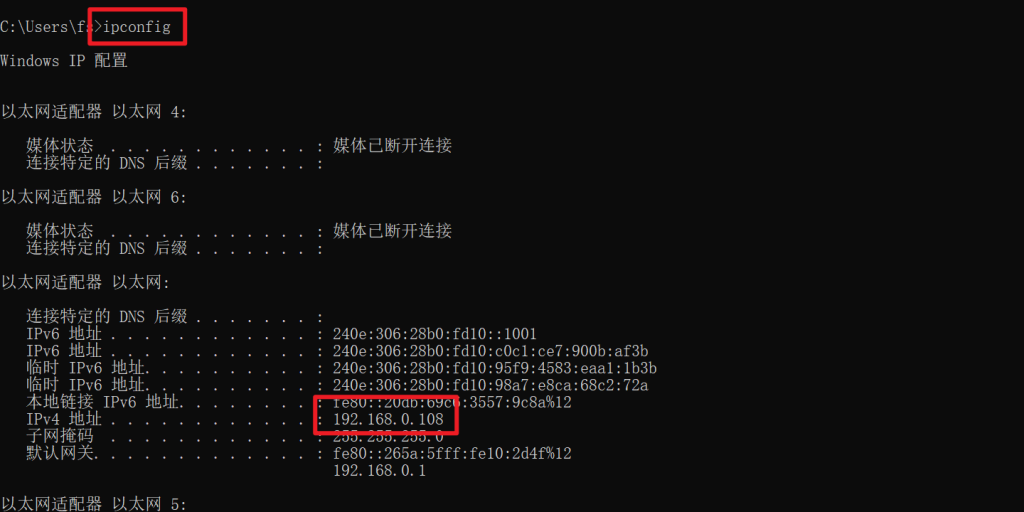
IP地址因机器而不同。
在设备的命令行中输入:
sudo nano /etc/environmentenvirinment内输入(注意下文是模板,你需要根据实际情况进行修改):
export http_proxy="http://username:password@proxyipaddress:proxyport" export https_proxy="http://username:password@proxyipaddress:proxyport" export no_proxy="localhost, 127.0.0.1"用代理的IP地址和端口替换proxyipaddress和proxyport。
export http_proxy="http://192.168.0.108:7899" export https_proxy="http://192.168.0.108:7899" export no_proxy="localhost, 127.0.0.1"保存的话,按下:Ctrl + X
然后在设备的命令行中输入:
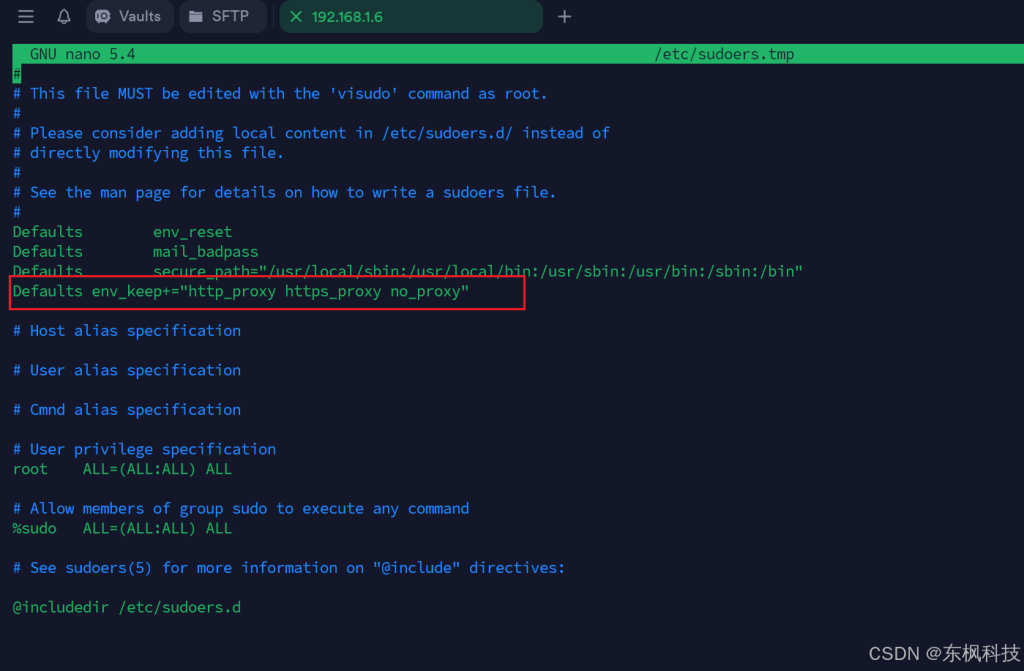
sudo visudo将下面的行添加到文件中,这样sudo将使用您刚刚创建的环境变量(注意查看位置):
Defaults env_keep+="http_proxy https_proxy no_proxy"注意拷贝的位置
重启
sudo reboot安装相控阵相关软件
wget https://github.com/thorenscientific/rpi_setup_stuff/raw/main/phaser/phaser_sdcard_setup.sh sudo chmod +x phaser_sdcard_setup.sh ./phaser_sdcard_setup.sh sudo reboot重启之后运行
sudo pip install --force-reinstall numpy==1.22你可以参考其他的文档进行下一步的实验之旅了!