您的购物车目前是空的!
标签: CN0566
-
华盛顿大学:使用 CN0566 进行 ISAR 成像
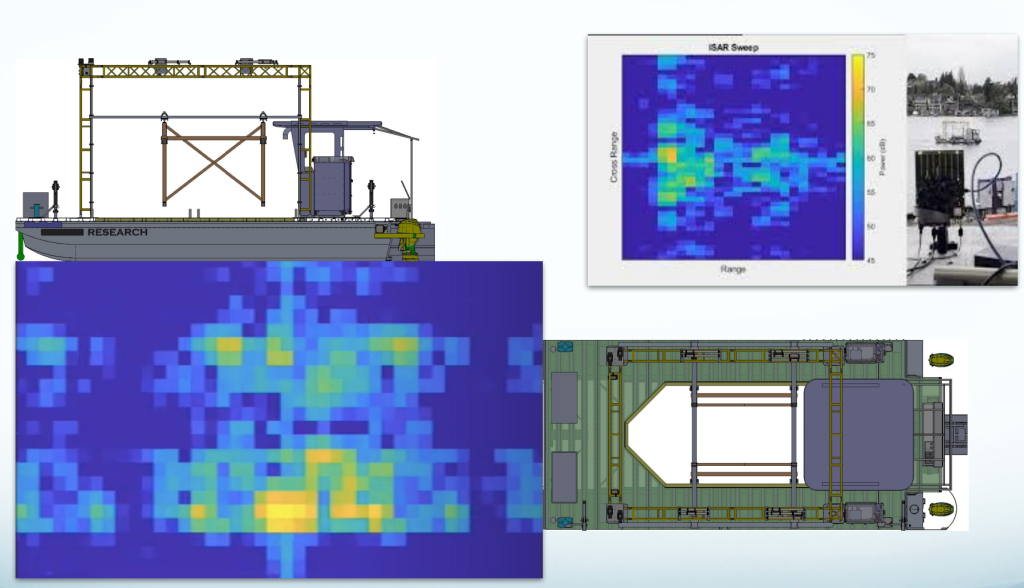
两名华盛顿大学的学生使用 X波段相控阵雷达套件 (CN0566) 构建了一套系统,用于生成近岸海事船舶(范围小于 1.8 公里,分辨率 0.3 米)的 ISAR 图像。对于初学者来说,CN0566 是一款教学用的相控阵雷达,允许使用真实的波束成形硬件进行项目开发(工作在 X 波段,频率约为 10.25 GHz)。
原作者代码
https://gitee.com/tekdf/mantis-2024-aess-challenge
原始论文
研究团队
- Nicole Pham
- Dylan Wesen
项目摘要
逆合成孔径雷达 (ISAR) 是一种利用雷达数据生成图像的技术。ISAR 与 SAR 的相似之处在于,它利用雷达与目标或场景之间的相对运动来形成大型合成孔径,从而实现精细的方位分辨率。SAR 和 ISAR 的不同之处在于,ISAR 使用固定雷达对运动目标进行成像,而 SAR 利用雷达运动对(通常)静止场景进行成像。SAR 通常可以利用机载传感器(例如 GPS 或 INS)对雷达平台进行运动估计,而 ISAR 必须使用各种信号处理技术来估计、补偿和利用目标运动。
团队创建了一个可以放置在岸上的 ISAR 系统,它可以作为岸上团队观察水上交通的低成本监控系统。该系统相对于光学系统的优势在于,即使在能见度较差的条件下(例如雾天和黑暗),它也能正常工作。它还可以扩展为分类系统,识别被跟踪船只的类型。
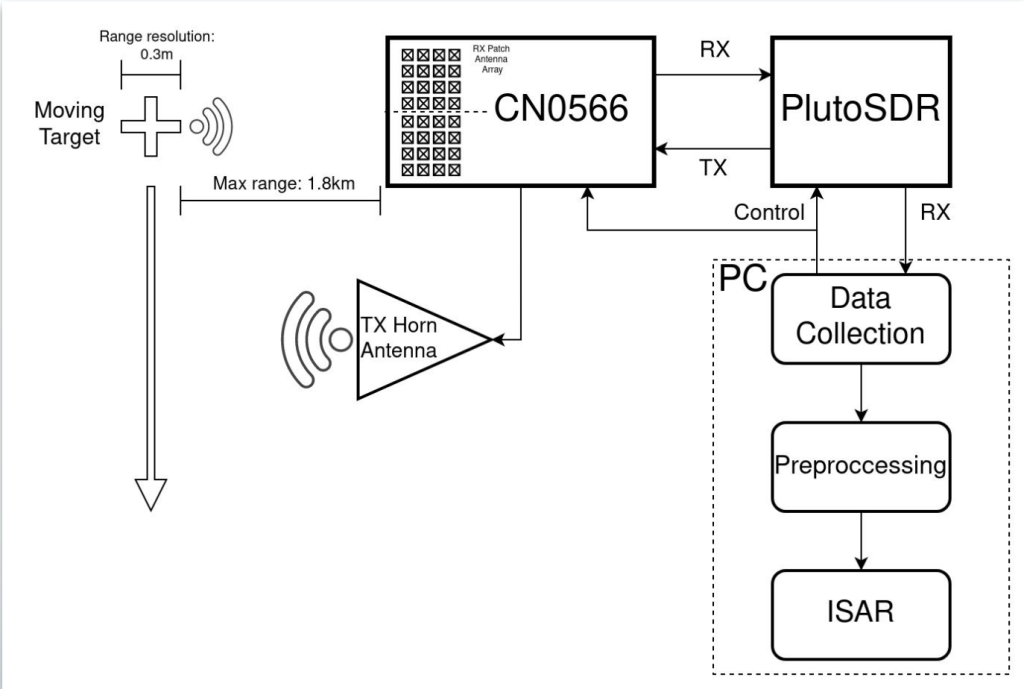
图 1. 系统框图 数据采集
SDR 设置概要
- 采样率(Sample Rate):25Msps
- TX 和 RX LO:2.15GHz
CN0566 设置概要
- 本振(LO):12.0GHz
- 斜坡模式(Ramp Mode):连续锯齿波(Continuous Sawtooth)
- 线性调频带宽(Chirp Bandwidth):500MHz
- 每次采集的斜坡数量(Number of ramps per acquisition):3
- 斜坡持续时间(Ramp duration):600us
- 射频范围(RF range):9.85GHz-10.35GHz
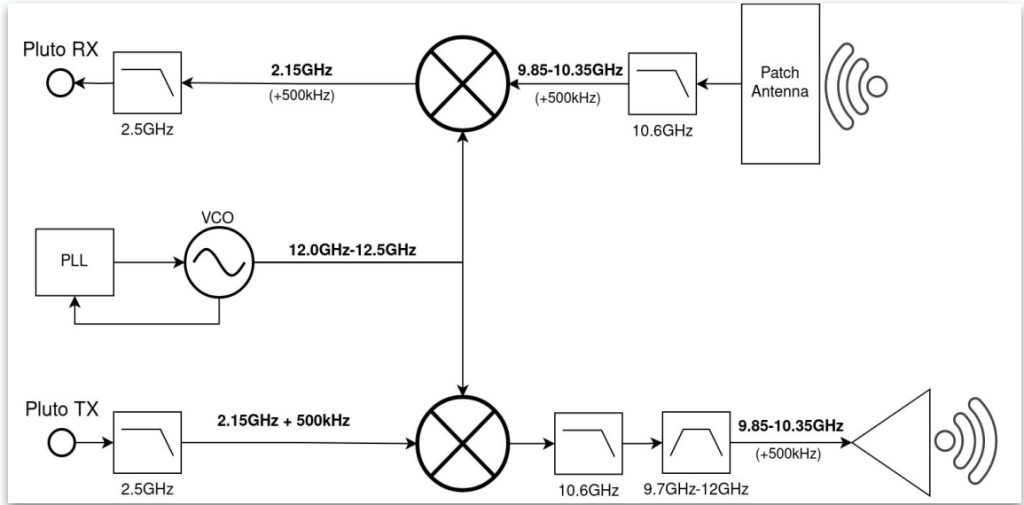
图 2. Phaser 框图 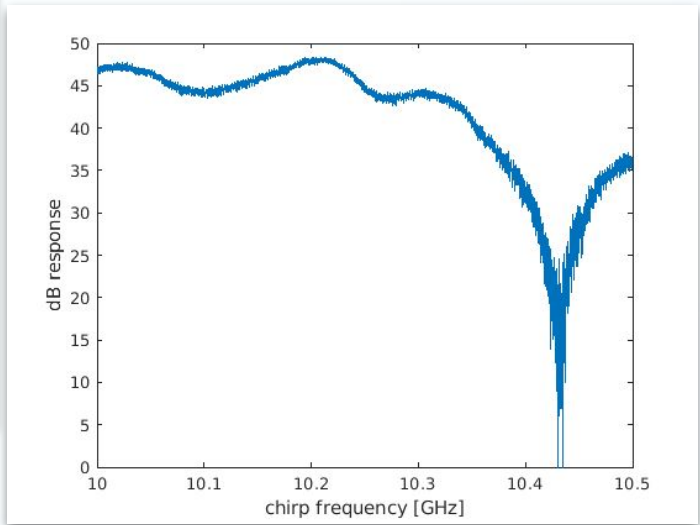
图 3. dB Response 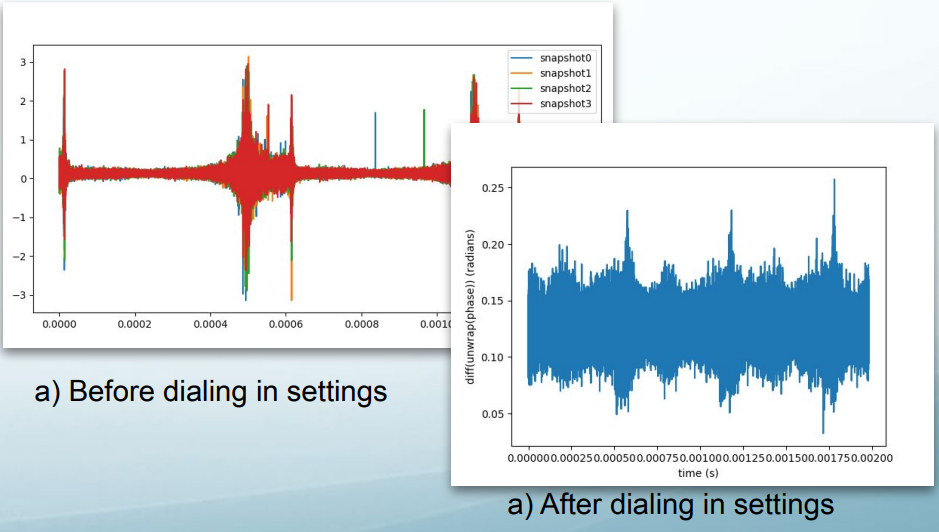
图 4. Diff 展开阶段 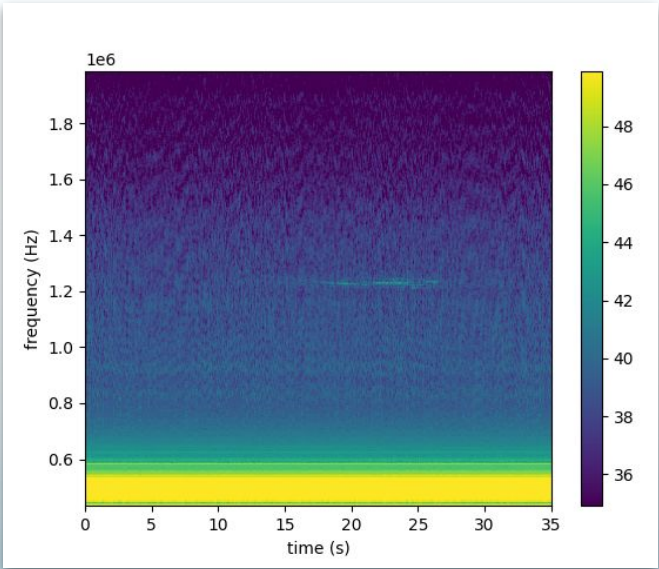
图 5. 飞越瀑布图 预处理
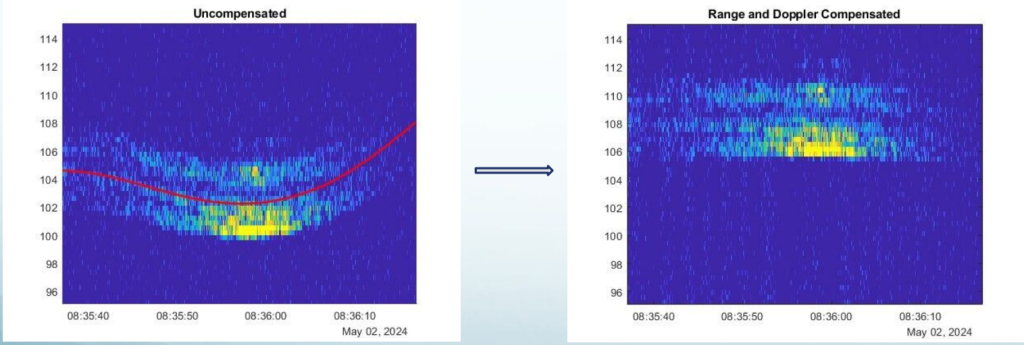
这些数据在用于 ISAR 之前仍需要进行一些校正。我们的预处理显著提高了我们解析目标的能力。
步骤
- 相位校正
- 窗口化
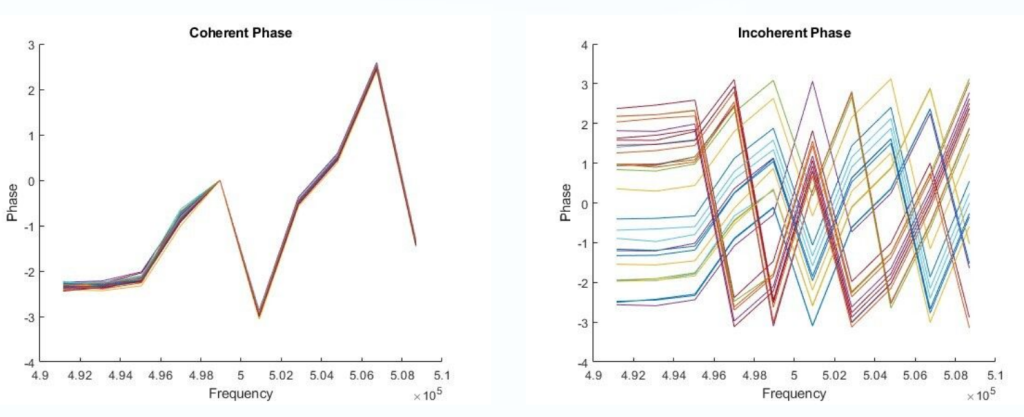
图 6. 相位对齐 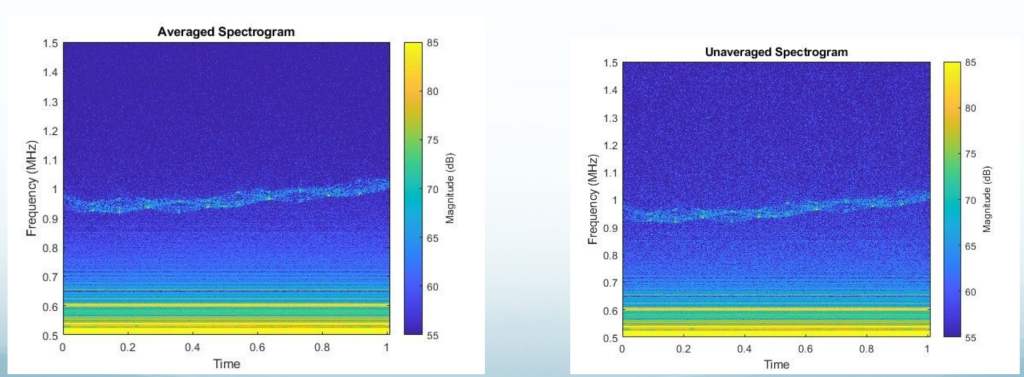
图 7. 频谱图 ISAR
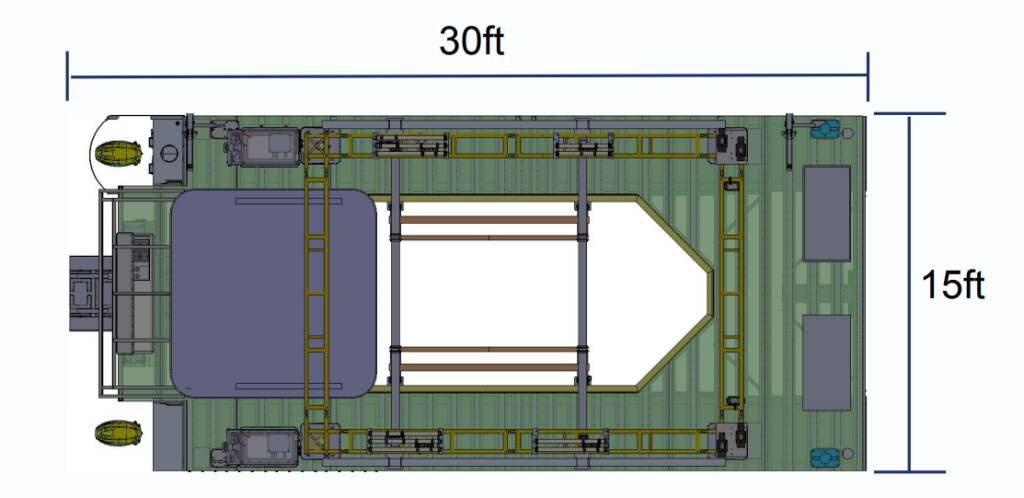
步骤 1:了解目标尺寸
步骤 2:找到频率带宽(范围)和角宽度(交叉范围)
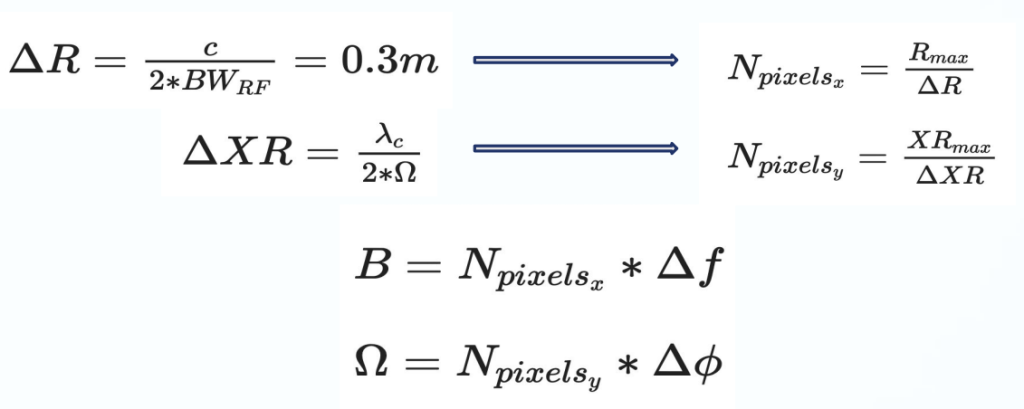
步骤 3:使用跟踪补偿预处理数据的范围(根据需要)
步骤 4:对背向散射数据进行二维傅立叶变换
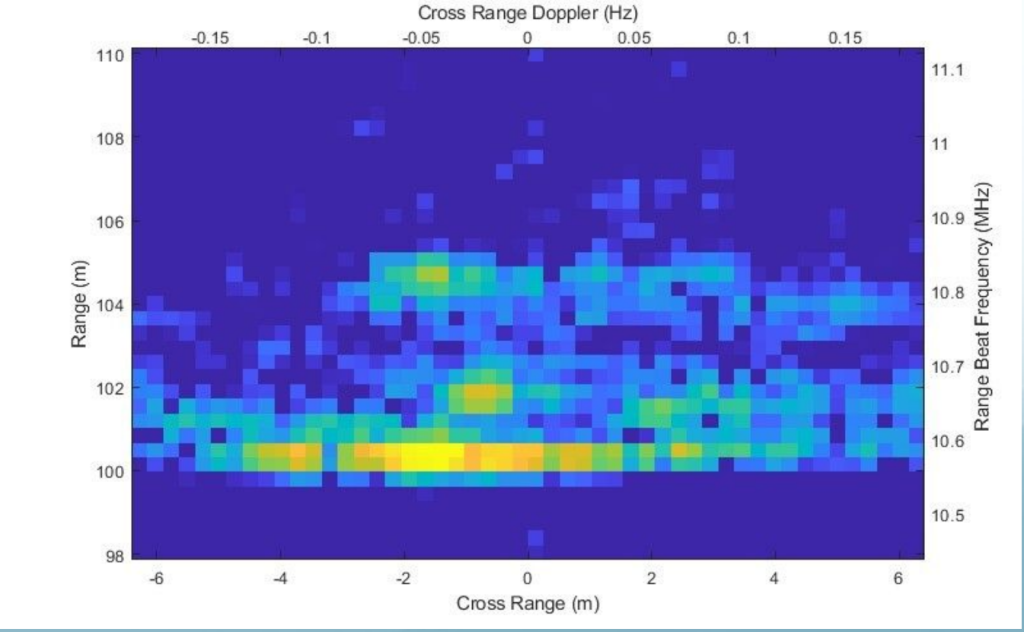
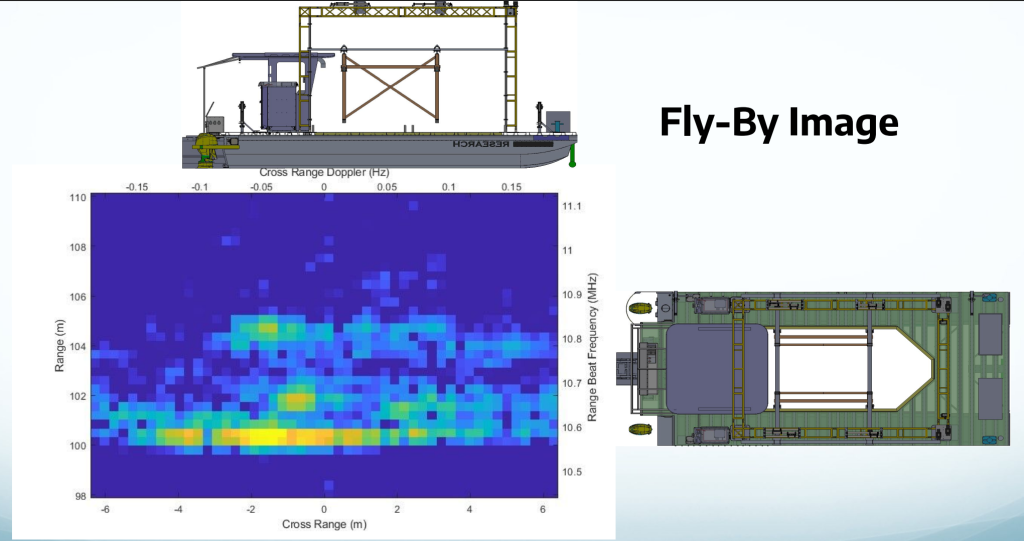
Fly-By Image
Fixed Rotation Image
未来工作
先进的运动补偿和自动对焦
- 先进的运动补偿和自动对焦
- 尾流传感
- 设备是X 波段和垂直极化
根据特性使其更适合水面扫描 - APL 在波浪重建和尾流传感研究方面拥有丰富的经验
- 设备是X 波段和垂直极化
- 使用机器学习对 ISAR 图像进行分类
- 船舶识别
- 特征识别
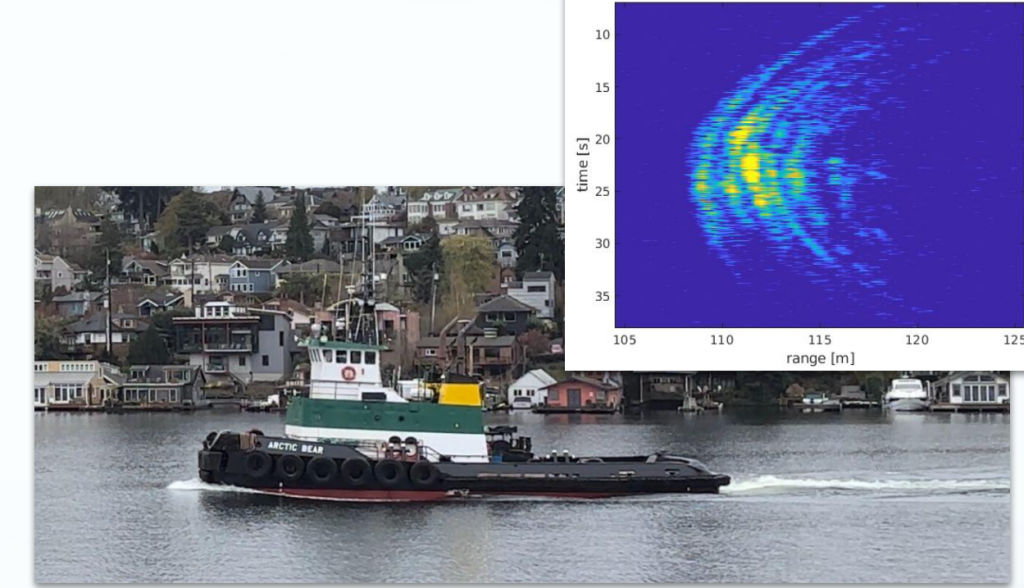
图 8. 未来尾流传感工作 -
相控阵天线波束图样 — 第三部分:旁瓣(Sidelobes)与加权(Tapering)
引言
在第一部分中,我们介绍了相控阵的基本概念、波束指向和阵列增益。在第二部分中,我们提出了栅瓣和波束偏频的概念。在本节中,我们将从天线旁瓣及在阵列中施加加权(Tapering)的影响开始讨论。加权本质上是对各个阵元在整体天线响应中所占振幅贡献的调节。
在第一部分中,并未应用加权,因此图中可以看到第一旁瓣为 –13 dBc。加权提供了一种在以一定代价牺牲增益与主瓣宽度的前提下,降低天线旁瓣的方法。在引入加权的基本概念之后,我们还将进一步说明一些与天线增益相关的要点。
傅里叶变换:矩形 ↔ Sinc 函数
在电气工程中,矩形函数在一个域内变换为另一个域中的 sinc 函数是一个经常出现的现象。最常见的情形是:时间域中的矩形脉冲在频域中会产生一个 sinc 形状的频谱。
这种变换也可以反过来使用,例如宽带应用中将宽带波形变换为时间域中的窄脉冲。相控阵天线也具有类似特性:在阵列平面轴上采用矩形加权,将辐射出一个 sinc 形状的空间方向图。
对于这些情况,sinc 函数的旁瓣是一个问题,第一个旁瓣仅为 –13 dBc。图 1 说明了这一原理。
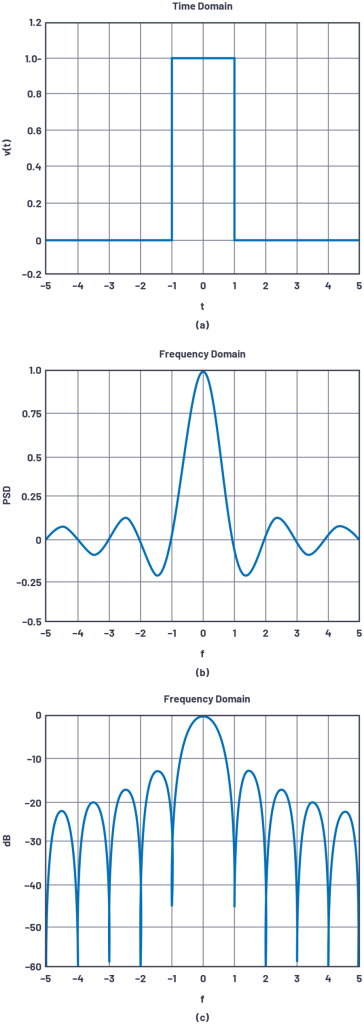
图 1. 时间域中的矩形脉冲在频域中产生 sinc 函数,第一个旁瓣仅为 –13 dBc。
加权(Tapering 或 Weighting)
解决旁瓣问题的方法是在矩形脉冲上施加加权。这在快速傅里叶变换(FFT)中是常见操作,相控阵中的加权选项与 FFT 中的加窗完全类似。
加权的不利之处在于,虽然旁瓣被抑制了,但主瓣也会因此变宽。图 2 展示了一些典型的加权函数示例。
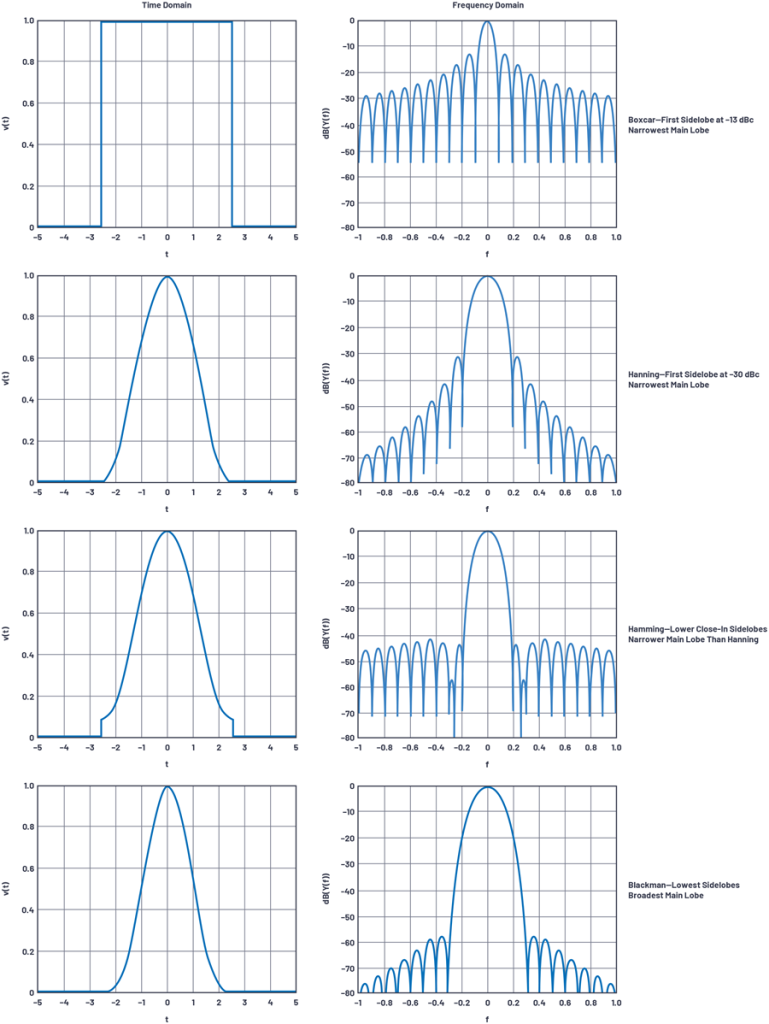
图 2. 加权函数示例。
波形与天线的类比
时间到频率的变换对大多数电子工程师来说是非常直观的。但对于首次接触相控阵的工程师,如何将该类比应用于天线方向图可能并不明显。
为此,我们将时间域信号替换为阵列孔径上的场分布,频域输出则替换为空间域方向图:
- 时间域 → 场域(Field Domain)
- v(t)v(t):时间函数上的电压
- E(x)E(x):孔径位置上的场强
- 频率域 → 空间域(Spatial Domain)
- Y(f)Y(f):频率函数上的功率谱密度
- G(q)G(q):角度函数上的天线增益
图 3 说明了这一原理。我们比较了对阵列施加两种不同加权情况下的辐射能量:
图 3a 和图 3c 表示场域,其中每个点代表一个 N = 16 阵列中阵元的振幅。在天线外部不再有辐射能量,辐射从天线边缘开始。在图 3a 中,场值在边缘突然变化,而在图 3c 中,场值是从边缘向中心逐渐上升的。
对应的辐射能量效果分别显示在图 3b 和图 3d 中。
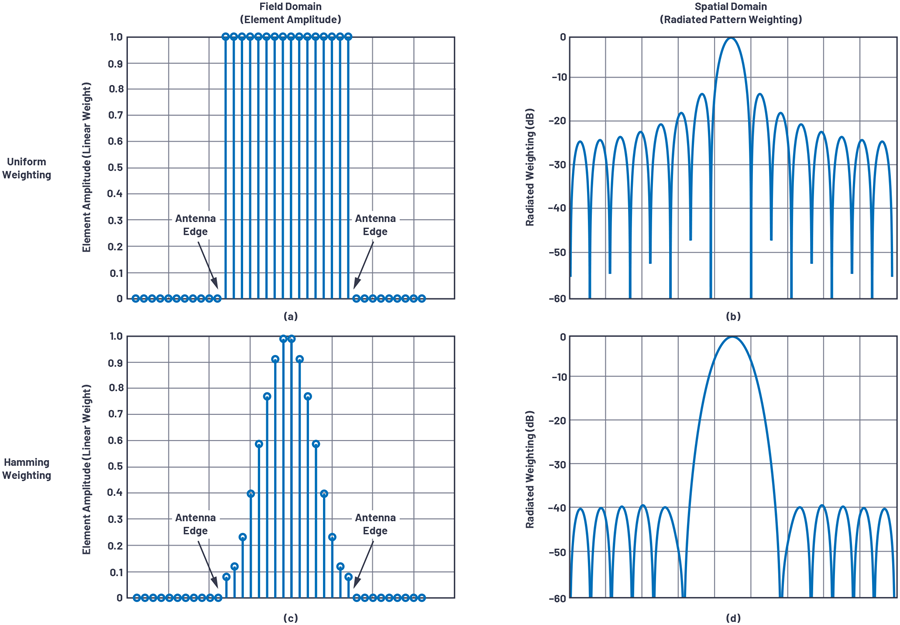
图 3. 元素加权在场域和辐射空间中的转换关系图;
(a) 所有阵元采用均匀加权;
(b) 空间方向图呈 sinc 形状;
(c) 阵元采用 Hamming 加权;
(d) 旁瓣被抑制至 –40 dBc,代价是主瓣变宽。在接下来的章节中,我们将引入两个会影响天线方向图性能的附加误差项:
第一个是互耦误差(Mutual Coupling)。在本文中我们仅对该问题予以承认,并指出需借助大量电磁仿真来定量评估其影响。
第二个是由于相位移控制位数有限所导致的量化旁瓣(Quantization Sidelobes)。我们将对量化误差进行更深入的分析,并对量化旁瓣进行量化评估。
互耦误差(Mutual Coupling Errors)
本文中的所有公式和阵列因子图都假设天线单元是理想的,即每个阵元彼此相同,且具有相同的辐射方向图。但在实际中,并非如此。
造成这种差异的原因之一是阵元之间的互耦,即相邻阵元之间的电磁耦合。当阵元之间间距较大或较小时,其辐射性能可能会有显著变化。阵列边缘的阵元所处的电磁环境与阵列中心的阵元也不相同。
此外,随着波束扫描角度的变化,阵元之间的互耦关系也会发生变化。这些效应都会引入附加误差项,天线设计人员必须将其考虑在内。实际上,设计过程中需投入大量精力借助电磁仿真工具来评估这些条件下的辐射性能变化。
波束角分辨率与量化旁瓣
另一种常见的相控阵天线性能缺陷源于用于波束指向的时间延迟单元或相移器的有限分辨率。这类设备通常通过数字控制,以离散的时间(或相位)步长进行调节。但我们该如何确定所需的分辨率或位数,以满足波束质量的设计目标呢?
与常见的误解相反,波束角分辨率并不等同于相移器的分辨率。在公式(1)(即第二部分中的公式(2))中,我们看到如下关系:

我们可以将该公式中的阵元间距 d 替换为阵列总宽度 D,以表示整个阵列的相位偏移。再将相移器的最小相位单位 ΦLSB 代入 ∆Φ,可近似表示波束角分辨率。对于一个具有 N 个阵元且阵元间距为半波长的线性阵列,其波束角分辨率如 公式(2)所示。

这是波束偏离波束零向(boresight)时的分辨率,表示在阵列一半设置为 0 相移、另一半设置为相移器最小位(LSB)时的波束角度。当施加 LSB 的阵元少于阵列的一半时,还可实现更小的角度。
图 4 展示了一个由 30 个阵元组成的阵列使用 2 位相移器时的波束角度变化过程,即从左到右逐步将 LSB 相位施加到阵列各阵元上。可以看到,波束角度在施加至一半阵元时达到最大,然后当所有阵元都处于 LSB 状态时恢复为零。这是因为波束方向依赖于阵列两端的相位差。注意该特性峰值对应的是先前计算的θRES。
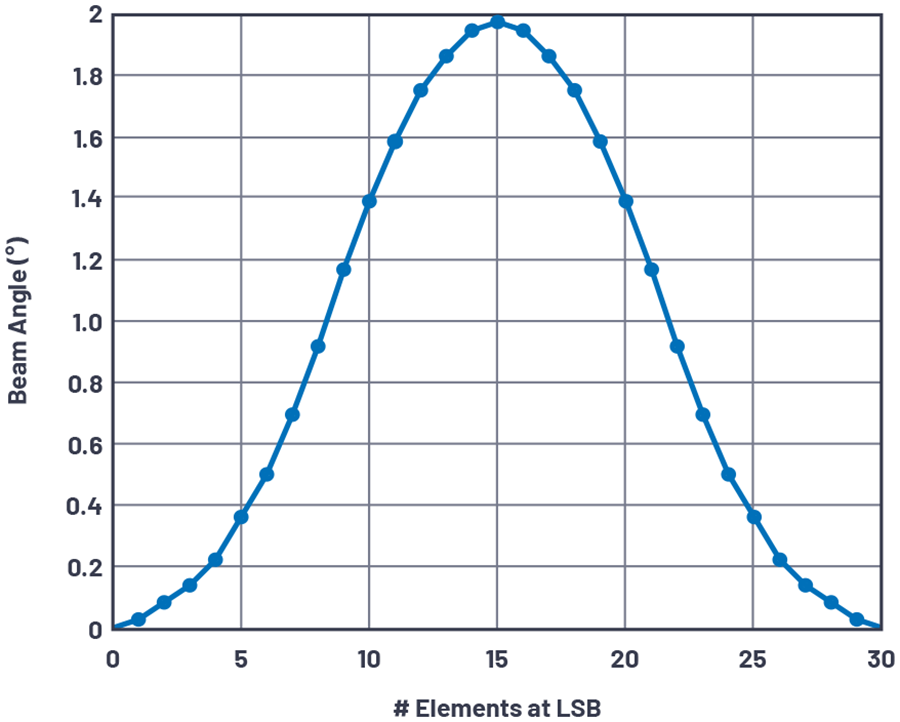
图 4. 波束角度与施加 LSB 的阵元数量关系图(30 元线性阵列)
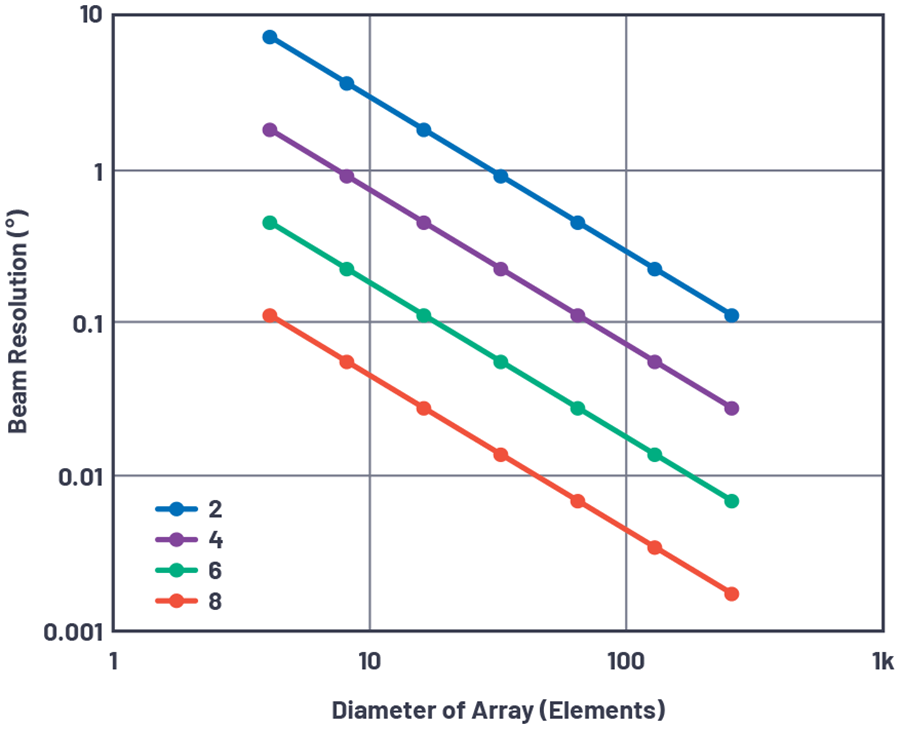
图 5. 波束角分辨率随阵列尺寸变化图(相移器位数为 2 至 8 位)
图 5 绘制了在不同相移器分辨率下,波束角分辨率 θRES 随阵列孔径大小(λ/2 阵元间距)变化的关系。图中表明,即使是位数很低的 2 位相移器(90° LSB),在 30 个阵元构成的阵列中也能实现约 1° 的分辨率。根据第一部分中的公式(10),30 元半波长阵列的主瓣宽度约为 3.3°,说明即使采用粗略的相移器,其角分辨率也已足够。
那么,使用更高分辨率的相移器能带来什么优势呢?借用时间采样系统(数据转换器)与空间采样系统(相控阵天线)之间的类比,更高分辨率的数据转换器将产生更低的量化噪声底,同理,更高分辨率的相移器或延迟器将带来更低的量化旁瓣电平(QSLL)。
图 6 显示了前述 2 位、30 元线性阵列中各阵元的相移设置及其误差分布。在该示例中,阵列一半设置为 0 相移,另一半设置为 90° LSB,相移误差呈锯齿状。
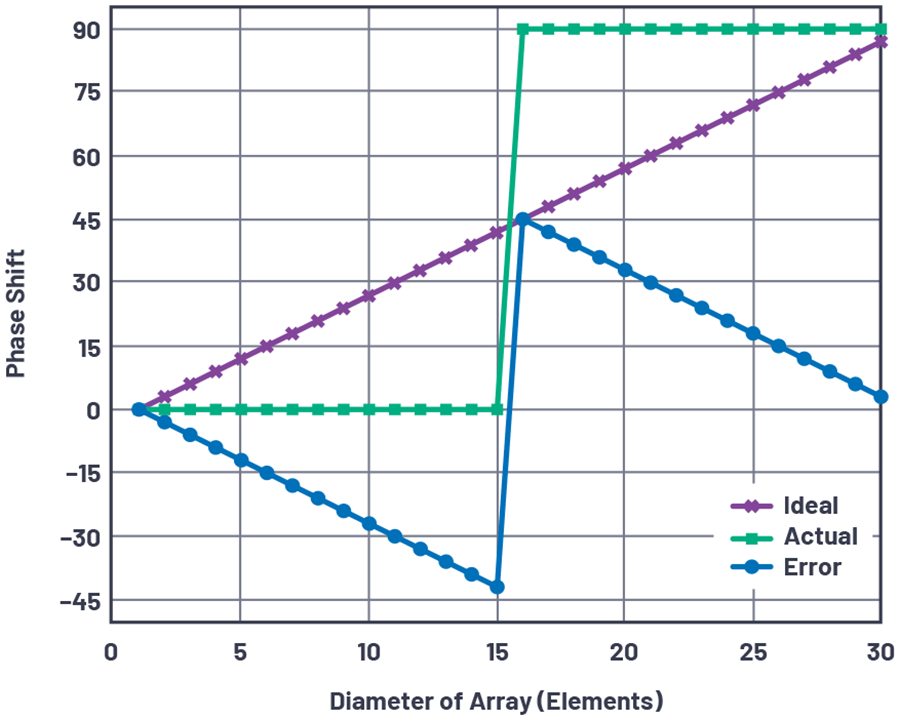
图 6. 阵列中各阵元的相移与误差分布
图 7 展示了该天线在指向 0° 和指向波束角分辨率角度 θRES 时的天线方向图。可以看到,相移器的量化误差导致图样严重劣化。
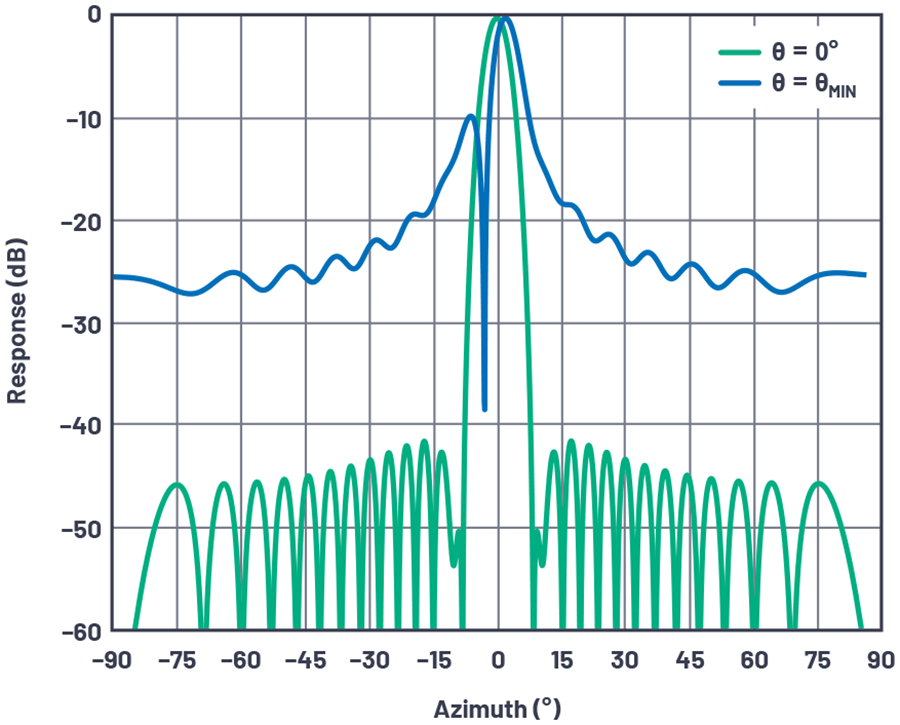
图 7. 在最小波束角度下的天线方向图,出现量化旁瓣
最严重的量化旁瓣发生在整个阵列中出现最大量化误差时,即每两个相邻阵元一个为 0 误差,另一个为 LSB/2。此时量化误差最大,且在阵列上呈现最高周期性。图 8 展示了 2 位、30 元阵列在这种最差情况下的方向图。
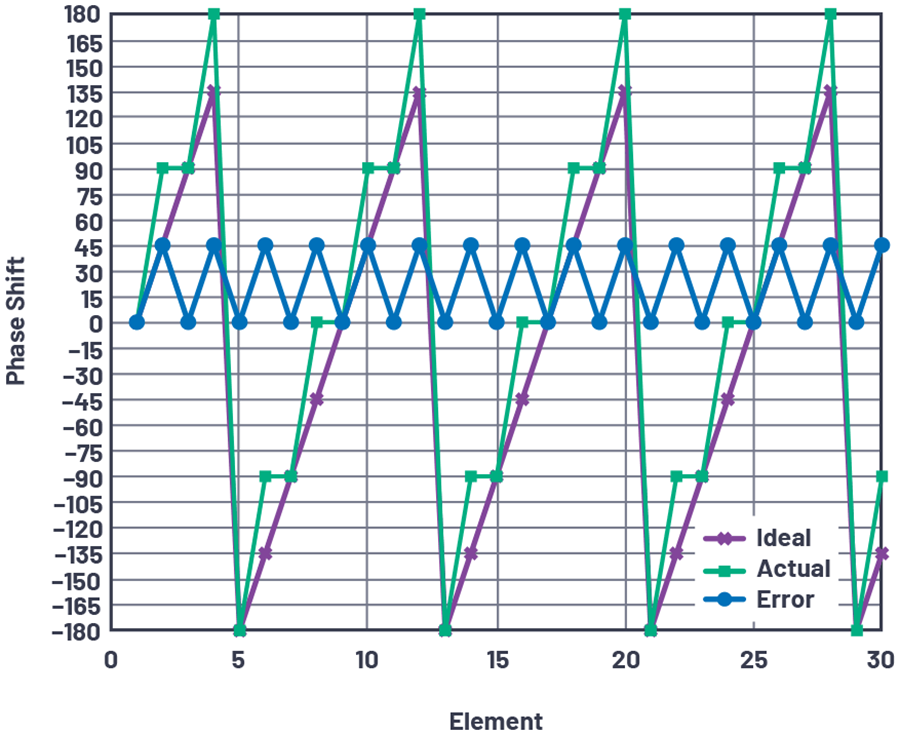
图 8. 最差情况下的天线量化旁瓣 — 2 位相移器
这种最差情况发生在一些可预测的波束角度,如公式(3)所示:

其中 n < 2BITS,且 n 为奇数。对于一个 2 位系统,这种情况在 ±14.5° 和 ±48.6° 出现四次。图 9 展示了该系统在 n=1、q=+14.5°情况下的方向图,其中可以观察到 –50° 处出现 –7.5 dB 的量化旁瓣。
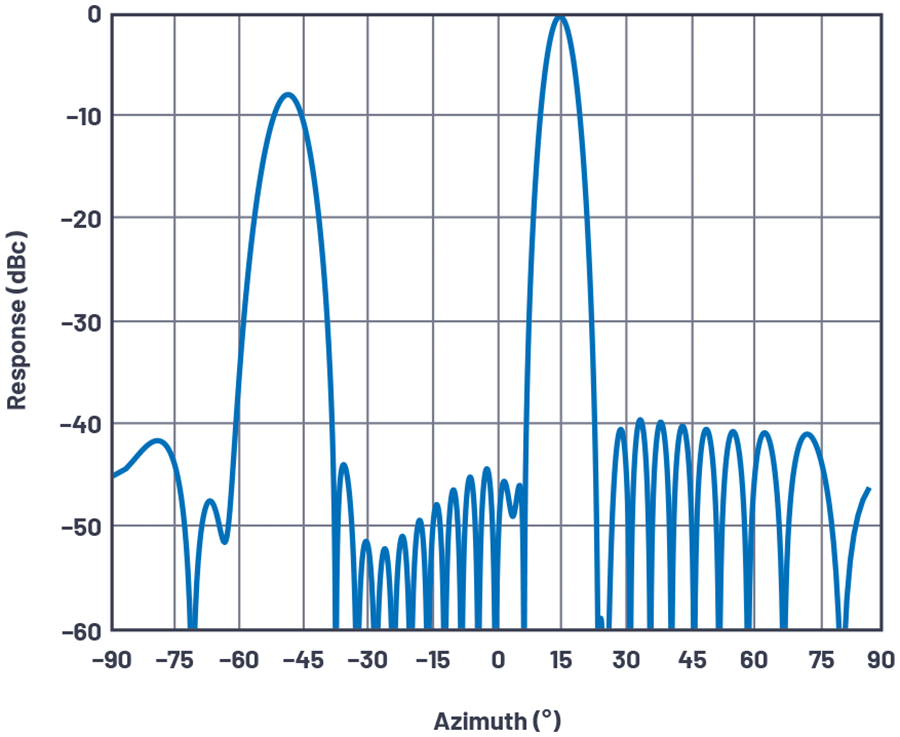
图 9. 最差天线量化旁瓣 — 2 位,n = 1,30 阵元
当波束角度不是这些特殊情况(即误差依次为 0 和 LSB/2)时,均方根误差会因在孔径上被分散而减小。事实上,对于公式(3)中 nn 为偶数的情形,量化误差为零。
如果我们绘制不同分辨率下,最强量化旁瓣的相对水平,会出现一些有趣的规律。图 9 显示了 100 元线性阵列在使用 Hamming 加权后的最差量化旁瓣电平(QSLL),该加权可帮助区分量化旁瓣与前文讨论的窗口旁瓣。
需要注意的是,在 30° 角度时,所有量化误差归零,这是由于 sin(30°) = 0.5 的数学结果。对于任何位数的相移器,当其角度为更高分辨率系统的最差角度时,其量化误差为零。从图中可以看出,不同分辨率下最差旁瓣电平的位置,以及每增加 1 位带来的约 6 dB QSLL 改善。
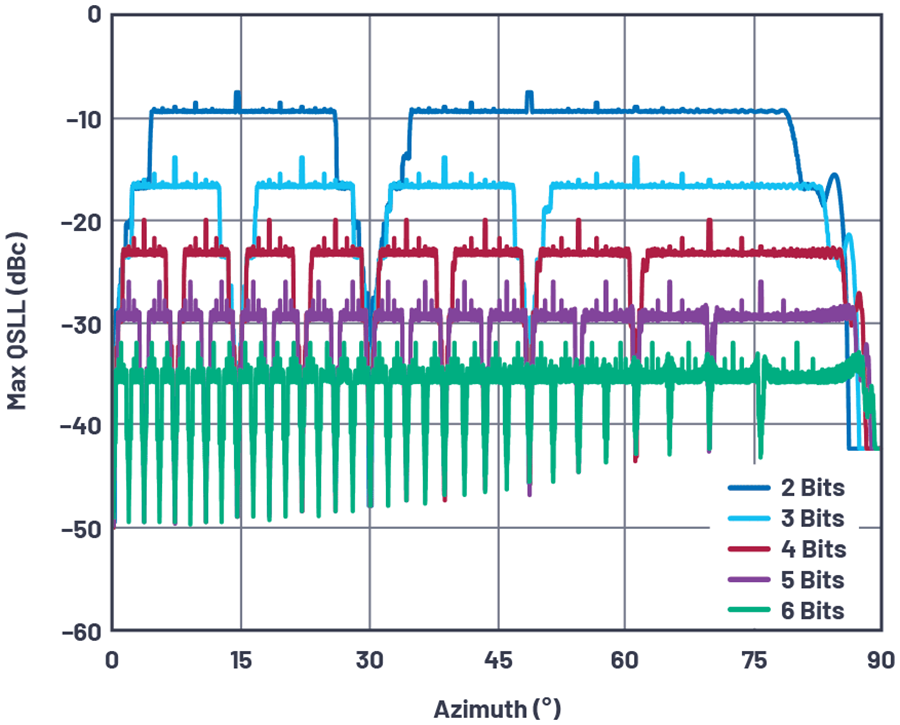
图 10. 最差量化旁瓣电平随波束角变化(2~6 位相移器)
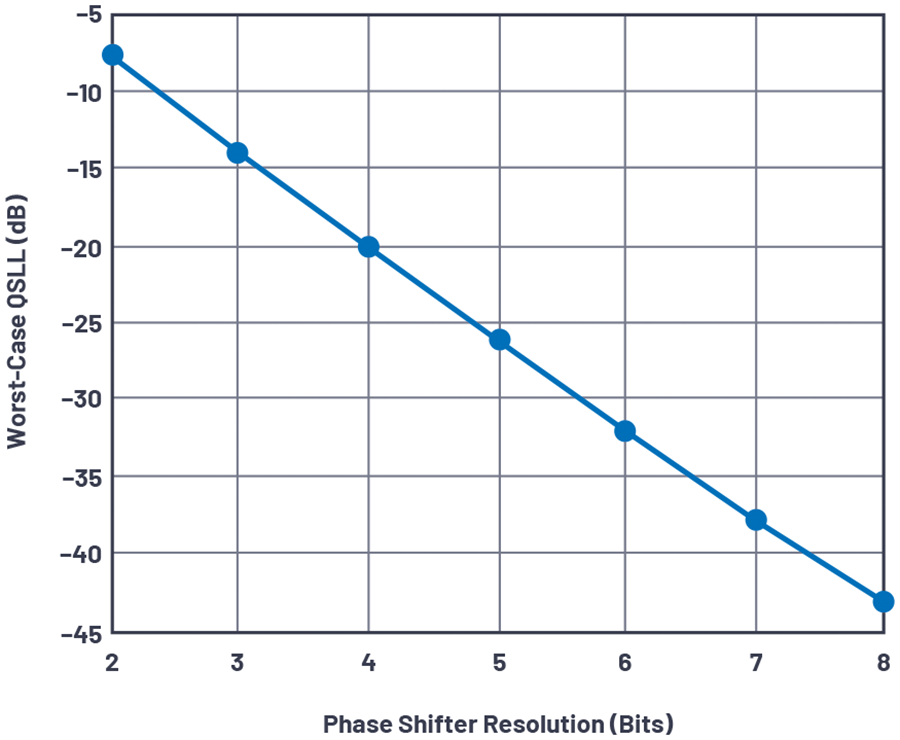
图 11. 最差量化旁瓣电平随相移器分辨率变化
图 11 展示了 2 位到 8 位相移器的最大量化旁瓣电平(QSLL),其遵循数据转换器中的经典量化噪声规律:

即每增加 1 位,旁瓣电平降低约 6 dB。对于 2 位相移器,QSLL 约为 –7.5 dB,高于典型数据转换器对随机信号采样时 +12 dB 的噪声底。这一差异可以理解为:由于量化误差呈周期性锯齿状分布在阵列孔径上,其空间谐波会在某些方向上相位叠加。
注意:QSLL 与阵列孔径大小无关。
结语
我们现在可以总结一些天线工程师在波束宽度与旁瓣方面所面临的挑战:
- 角分辨率需要窄波束。而实现窄波束需要大的孔径,这又需要更多的阵元。此外,当波束偏离波束零向(boresight)进行扫描时,波束会变宽,因此在扫描角度增大时需要额外的阵元以维持波束宽度。
- 可能看起来可以通过增大阵元间距来增大天线整体面积而无需添加额外阵元,这样可以缩窄波束;但不幸的是,如果阵元均匀排列,这将引入栅瓣(grating lobes)。通过减小扫描角度、以及采用 非周期性阵列(aperiodic arrays)来有意随机化阵元布局,可以在增大天线面积的同时尽量减少栅瓣问题。
- 旁瓣是另一个问题,我们已了解到可以通过对阵列边缘阵元增益进行加权(tapering)来缓解。但加权会导致波束变宽,从而又需要更多阵元。相移器的分辨率也会引入量化旁瓣(quantization sidelobes),这些也必须纳入天线设计考量。对于使用相移器实现的天线,**波束斜移(beam squint)**现象还会导致波束方向随频率变化,从而限制了在高角分辨率下可用的带宽。
这篇为期三部分的相控阵天线方向图系列就此结束:
- 第一部分介绍了波束指向、阵列因子和天线增益;
- 第二部分介绍了栅瓣和波束斜移等非理想现象;
- 第三部分讨论了加权(tapering)和量化误差。
本系列并非面向那些精通电磁场和辐射单元设计的天线设计工程师,而是希望为大量在相控阵领域工作的相关学科工程师提供一种直观的解释方式,帮助理解各种因素对天线整体方向图性能的影响。
参考文献:
- Balanis, Constantine A.《Antenna Theory, Analysis and Design》,第三版,Wiley 出版,2005。
- Mailloux, Robert J.《Phased Array Antenna Handbook》,第二版,Artech House 出版,2005。
- O’Donnell, Robert M. “Radar Systems Engineering: Introduction.” IEEE,2012年6月。
- Skolnik, Merrill.《Radar Handbook》,第三版,McGraw Hill 出版,2008。
- 时间域 → 场域(Field Domain)