您的购物车目前是空的!
标签: CN0566
-
阿拉巴马大学:对无人机进行单 CPI 分类
原作者代码
https://gitee.com/tekdf/2024_IEEE_Radar_Challenge
研究团队
- Sean J. Kearney
- Josh Haeker
- Emily Curl
问题陈述
需要利用短时间内收集的数据来检测不明无人机(UAV)
目标

- MetaBird
- Syma 遥控直升机
- 电动螺旋桨
- DEERC 四轴飞行器
雷达数据
- X波段雷达
- 使用MATLAB运行
- 最大探测距离 = 2米
- 最大速度 = 5米/秒
- 频谱图:
- STFT
- 窗口大小:短窗口 vs. 长窗口
- Bin 大小:10 vs. 267
- 重叠:8 vs. 250
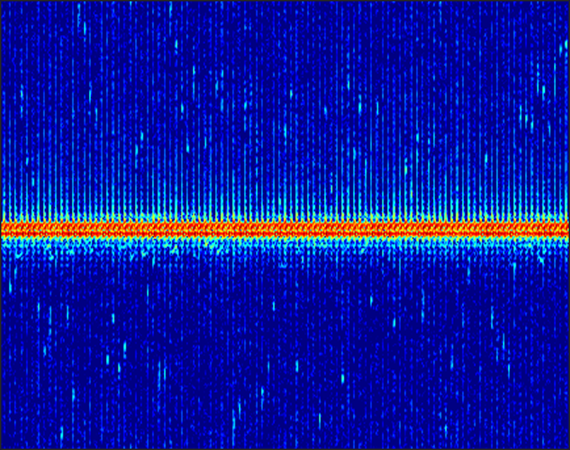
长窗口四轴飞行器的STFT 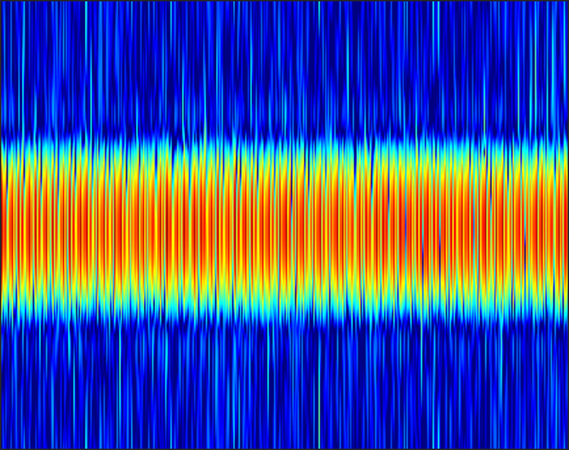
短窗口四轴飞行器的STFT 分类网络
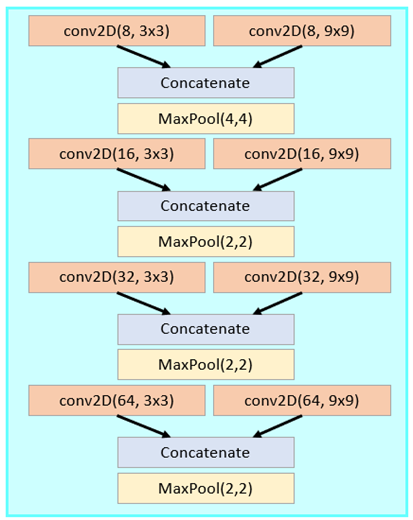
- 编码器 – 4 层
- 2 个卷积
- 卷积级联
- 最大池化
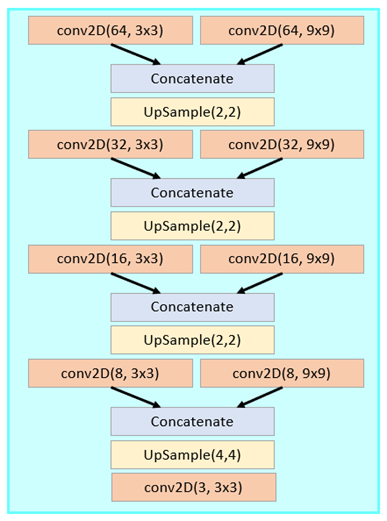
- 解码器 – 4 层
- 2 卷积
- 卷积级联
- 二维上采样
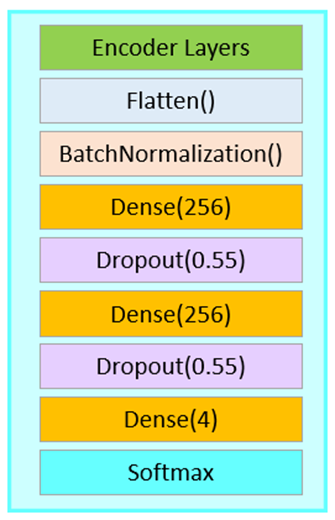
- 分类编码器
- 训练好的编码器,后接全连接层和softmax层
跨 100 个 CPI 进行分类
- 每个目标 9 个样本
- 长窗口
- 准确率 = 13.3%
- 短窗口
- 准确率 = 40%
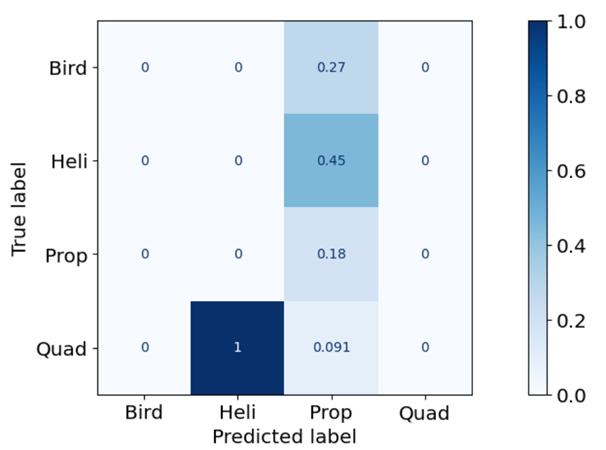
长窗口混淆矩阵 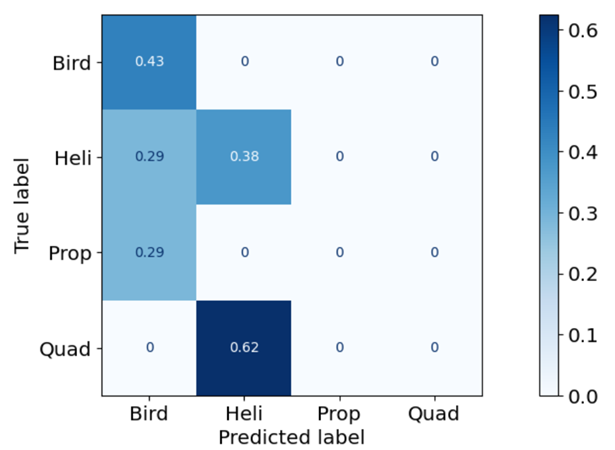
短窗口混淆矩阵 跨 1 个 CPI 的分类
- 每个目标 900 个样本
- 长窗口
- 准确率 = 84.4%
- 短窗口
- 准确率 = 97.6%
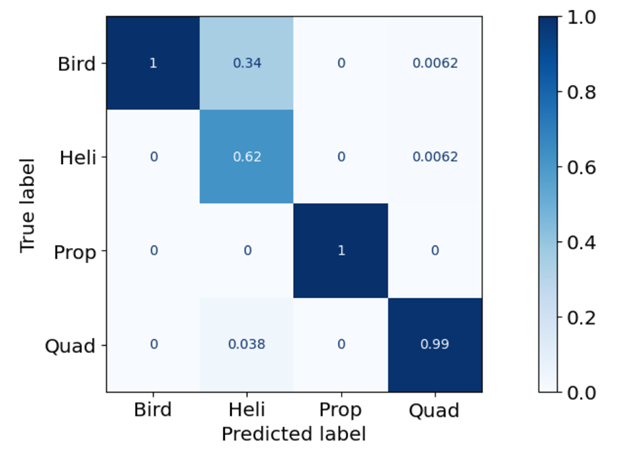
长窗口混淆矩阵 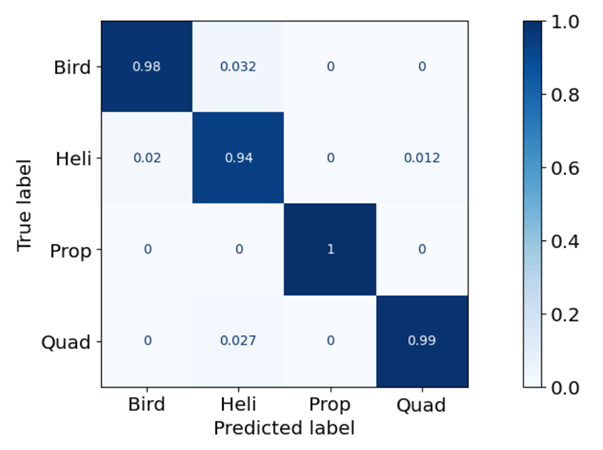
短窗口混淆矩阵 结论
- Phaser X 波段雷达可探测无人机特征
- 单次 CPI 无人机探测可提升训练数据集大小,进而提高模型分类准确率
- 单次 CPI 叶片闪光与 HERM 线的有效性对比
未来工作
- 远距离探测
- 不同 CPI 数量下的同等大小数据集如何比较?
- 环境中的噪声如何影响 Blade Flash?
附录
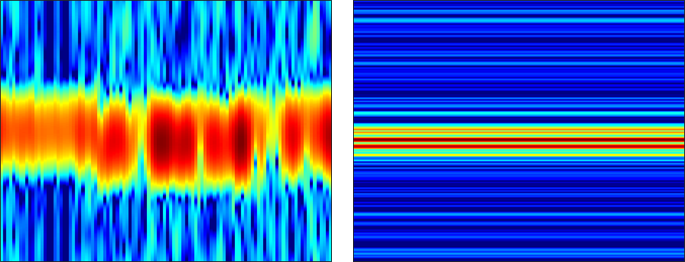
单个 CPI 频谱图
Bird (window 10 vs 200)
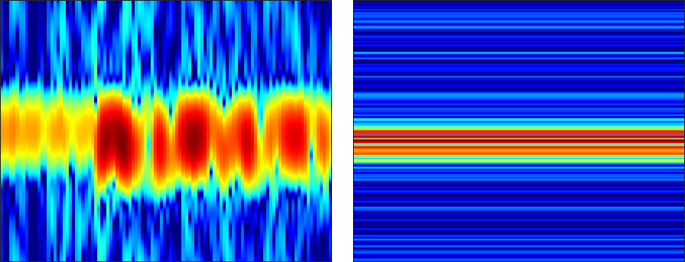
Heli (window 10 vs 200)
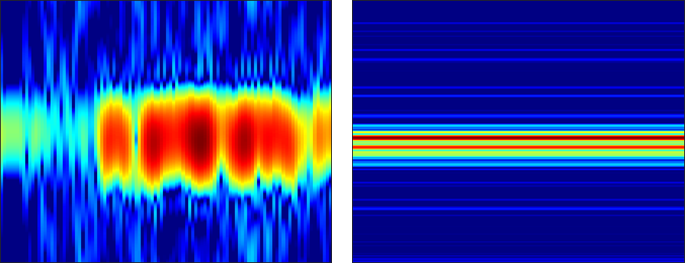
Propeller (window 10 vs 200)
Quad (window 10 vs 200)
-
加州大学伯克利分校:SPAPT 超低成本的断层扫描(利用一维相控阵获取三维断层扫描图像)
使用 Phaser Kit 进行低成本断层扫描!
原作者代码
原始论文
研究团队
- Min-Duan Tzeng
- Hsiu-Wei Hsu
- Shin Yi Low
- Wei-Chun Hwang
项目图片展示
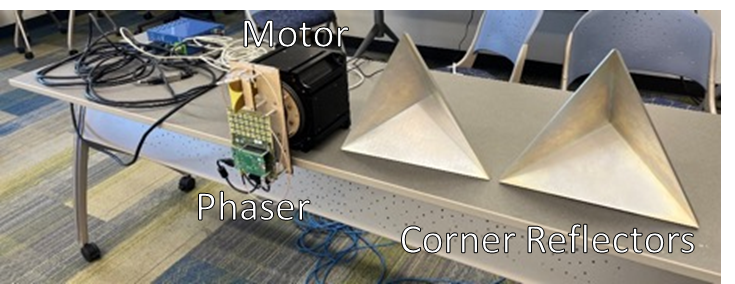
相控阵雷达由电机驱动旋转,这对于分辨一维阵列的不同方向至关重要。 
您可以看到 SPAPT 的模拟结果和实际结果 首先,我想概述一下 Phaser 套件硬件的功能。
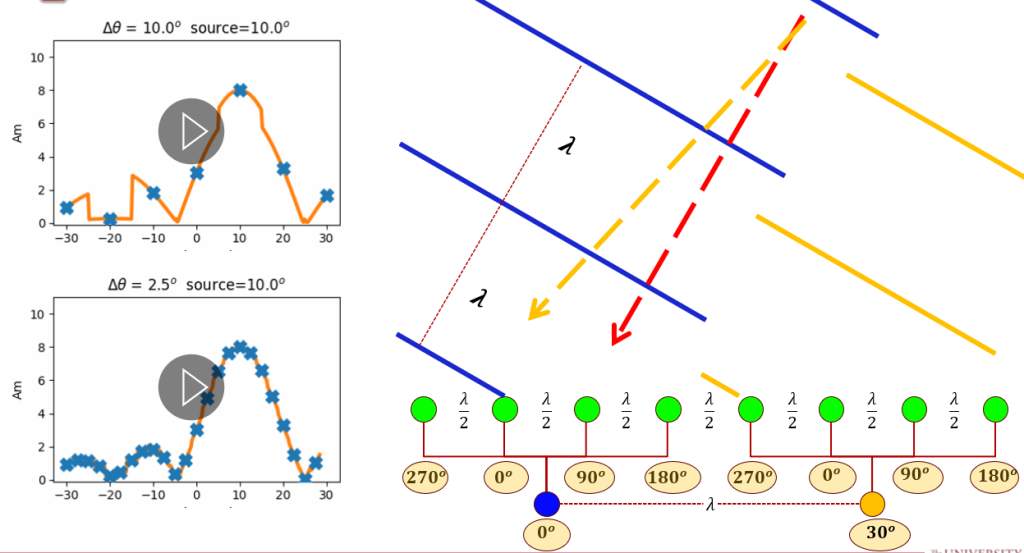
Phaser 有 32 个贴片天线,标记为红色块。然而,在应用相移之前,来自每列四根天线的信号会进行模拟合成。这八个具有可控相移的模拟通道随后被叠加到两个通道中,标记为两个蓝色块,并由 Pluto SDR 进行数字化。
总而言之,我们可以在 Phaser 上使用八个可控相移和两个数字 IQ 通道。
现在,让我们探索一下这些相位延迟和信号可以实现什么。在右图中,我们看到一个来自侧面方向的入射波。蓝线代表波前。很明显,所有元件都同时接收波前,这表明在叠加它们时不应应用相位延迟。
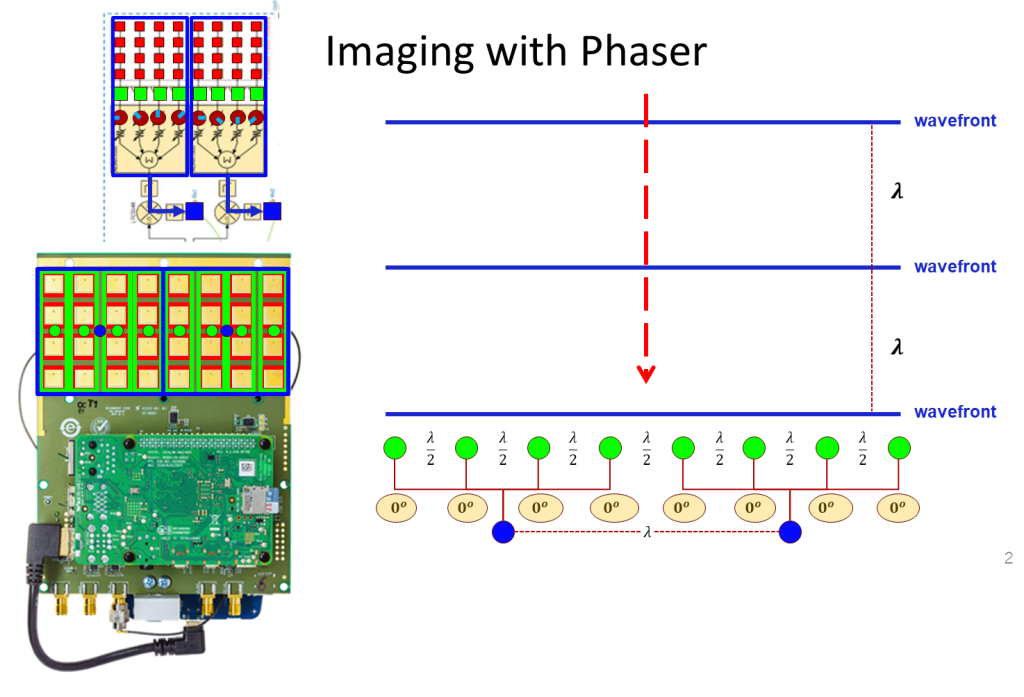
在这种情况下,信号源位于机头正面 30 度角,来自左侧。
我们观察到,波前并非同时被所有天线单元接收。在这种情况下,存在 90 度的相位差,并且相位差向左增大。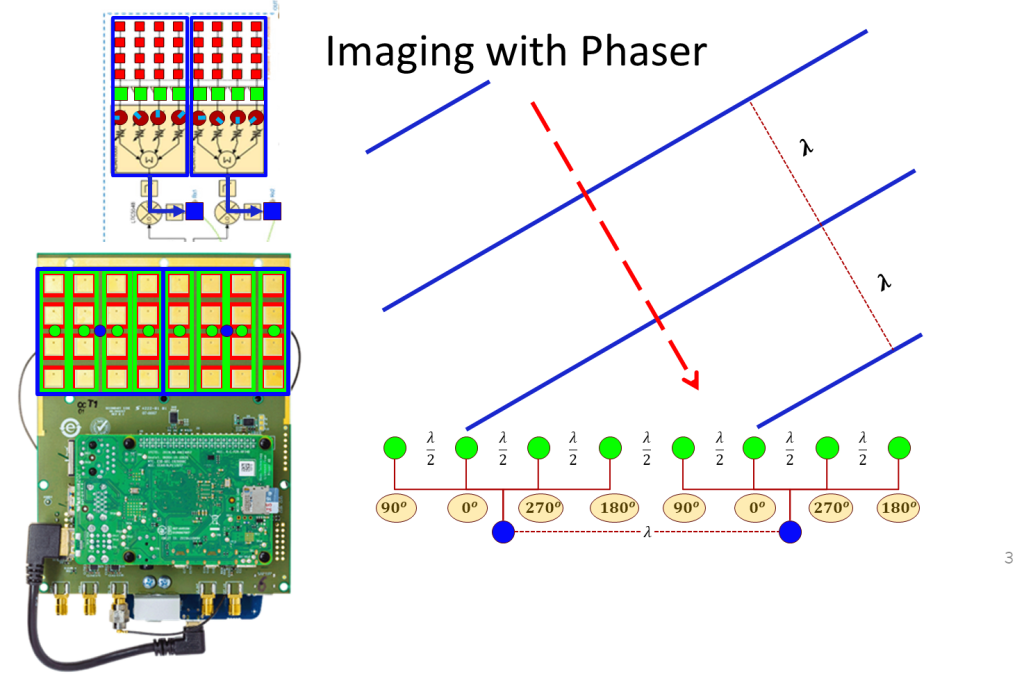
对于信号源位于正面右侧 30 度角的场景:
与前一种情况类似,阵元之间存在 90 度相位差。然而,在这种情况下,相位差向右增大。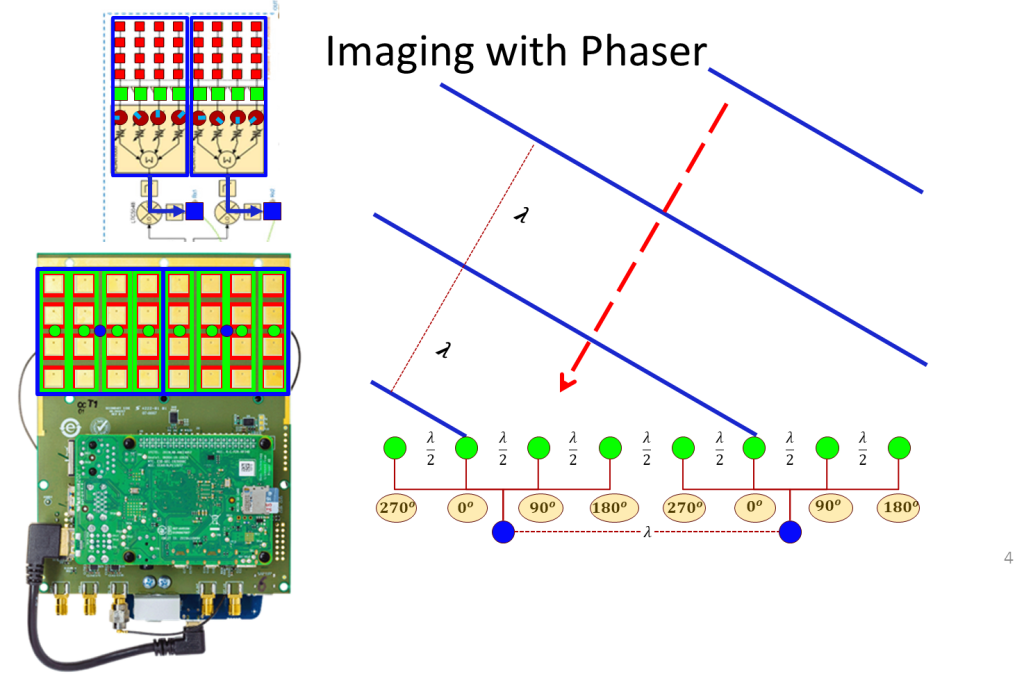
我们可以反复改变相位延迟,并绘制接收功率与转向角的关系图。这使我们能够确定功率最高的方向,从而指示信号源的位置。
然而,需要注意的是:由于信号的叠加在数字化之前在星上进行,我们无法同时将波束转向两个方向。因此,如果我们的目标是以 2.5 度的间隔进行成像,则需要发射四次脉冲才能实现,这会导致更新率降低。
如果我们要求更高的角度精度,情况将变得更加困难。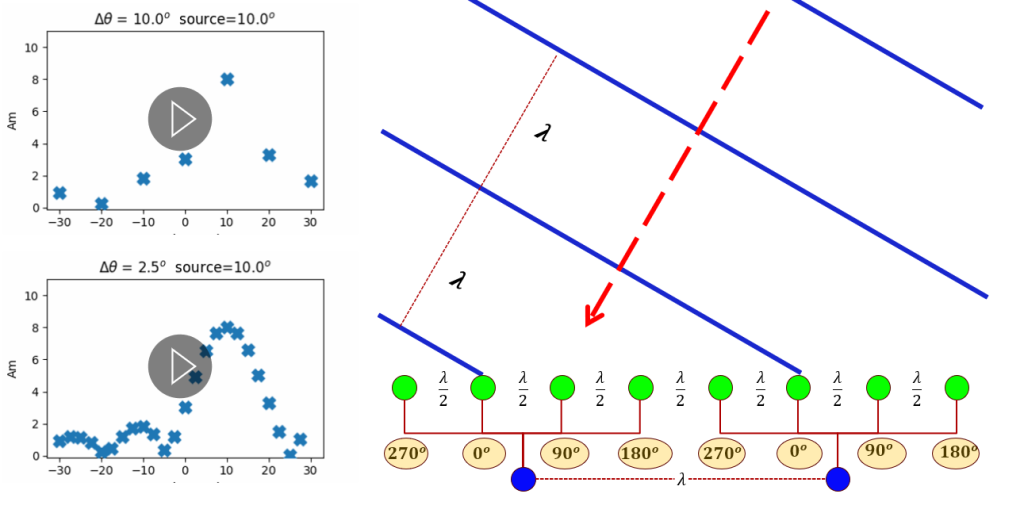
现在,值得注意的是,Phaser 可以数字化左右半面板的两个通道。此功能使我们能够在单个元件的模拟相移之上应用数字相移。因此,我们可以更精确地调整转向角度,而无需发送新的脉冲。该图显示了对右面板应用负相移以较小角度转向的情况。
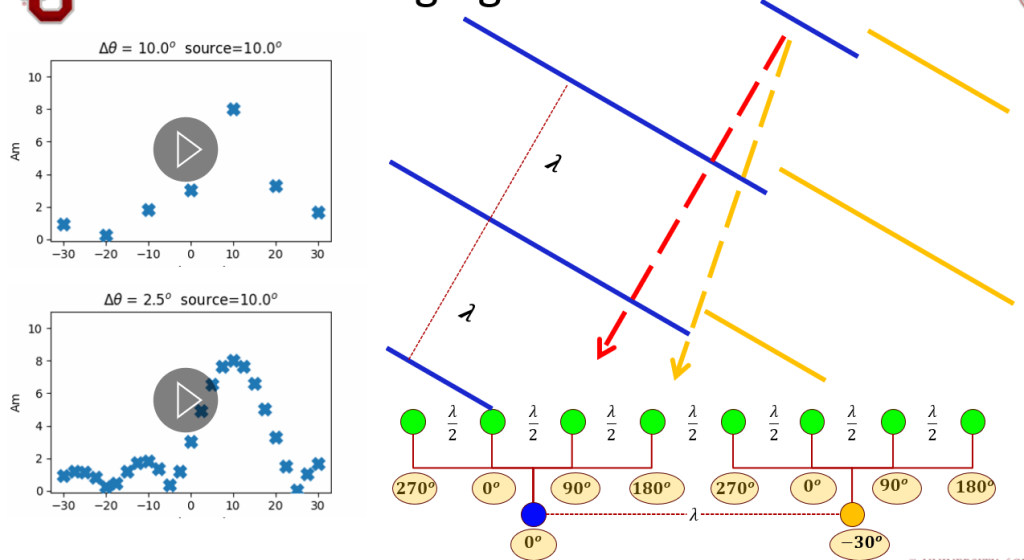
图中右侧面板的数字相移为正,指向角度更大。然而,Phaser 的数字波束传输存在局限性。这两个通道的有效元件位置相隔一个波长,从而导致栅瓣。如橙色线所示,数字指向与模拟指向的偏差越大,偏差就越大。我们必须考虑以 2.5 度为增量的模拟指向进行成像。然而,由于我们无法在组合垂直间隔的元件接收信号的同时应用相移,因此垂直方向的分辨率仍然不足。
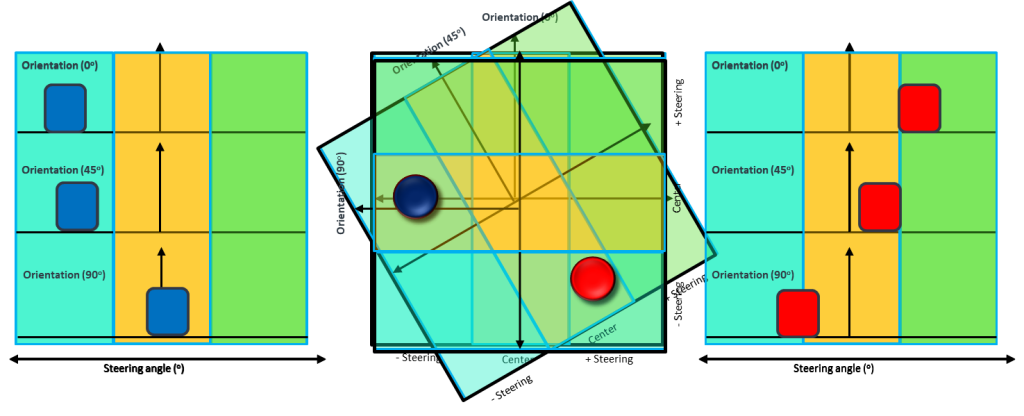
那么,我们不妨将相位器旋转到不同的方向,以改变可分辨的方向。这正是SPAPT实现二维成像的方式。如本动画所示,当相位器旋转至0度时,两个目标会向左右分离。将相位器旋转至45度后,红色目标会向侧面移动。进一步旋转会导致红色目标向左移动,而蓝色目标则与侧面对齐。这凸显了我们可以利用相位器的方向,将信号与正确的相移进行相干积分,从而实现断层扫描。
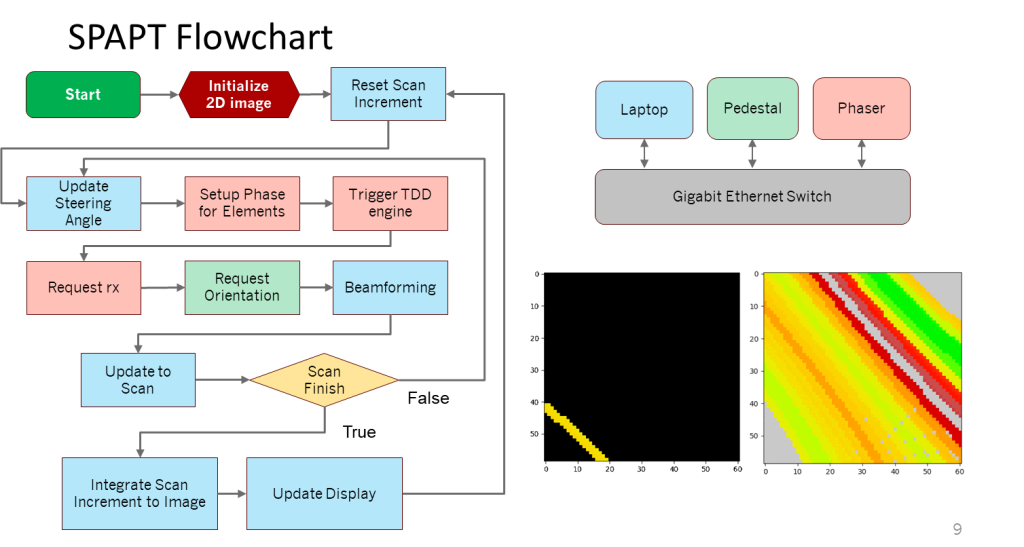
此流程图概述了SPAPT的流程。在初始化阶段,我们刷新图像缓冲区并重置扫描增量。接下来,我们更新所需的转向角,并将相应的相位分配给移相器。然后,我们触发TDD引擎进行传输。传输完成后,我们请求移相器的接收信号和基座的方向。利用这些信息,我们对当前扫描带进行混合波束形成。我们将此信息更新为扫描增量。如果扫描尚未完成,我们将使用不同的模拟转向角再次循环,如左侧动画所示。扫描增量完成后,我们将其积分到图像缓冲区中,如右侧动画所示。然后,我们刷新扫描增量并重复该过程。在积分多个方向后,我们开始观察图像中的解析像素
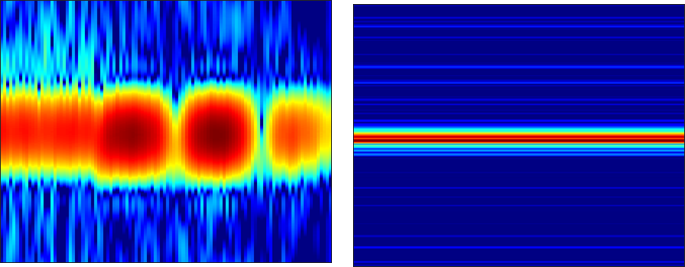
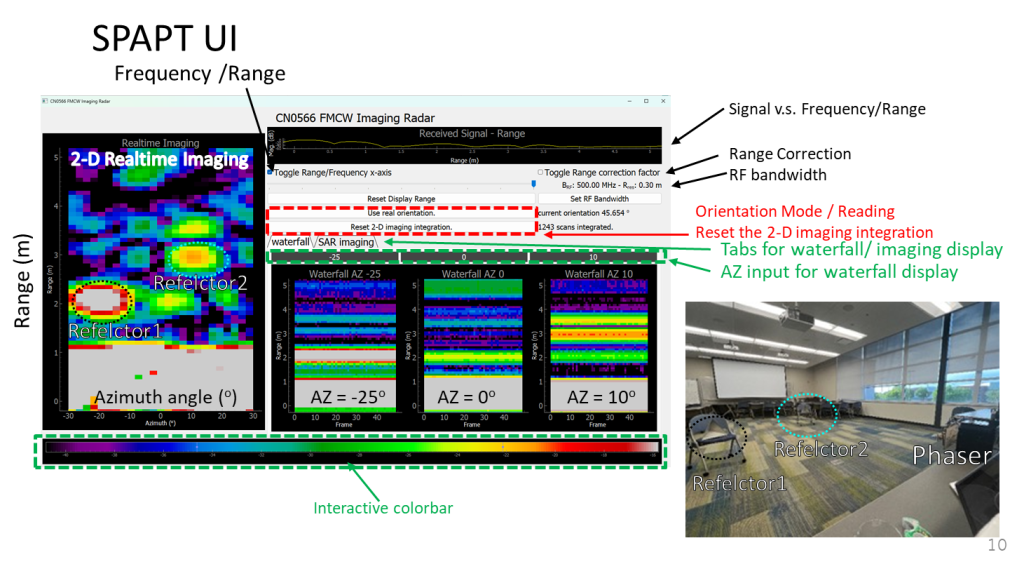
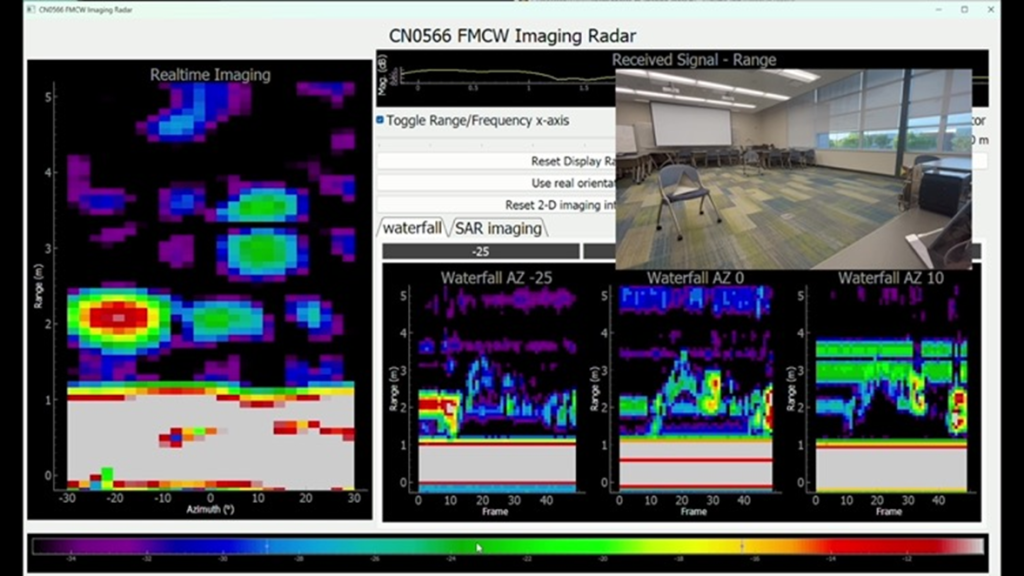
我们创建了一个用户界面,以便于 SPAPT 的测试。它包含实时成像显示、信号频谱图以及实时响应方位角变化的瀑布图。我们还可以切换到其他选项卡,查看所需范围的二维图像。显示可以在拍频和范围之间切换。此外,还有一个彩条,可让您一次性调整所有显示。此外,您还可以在状态监视器上查看基座的方向和累计扫描次数。
本次演示中,我们将展示实时成像技术。仔细观察,我们将目标左右移动,然后远离雷达,再返回到原始位置。所有这些移动都通过我们的相位成像系统进行检测和可视化。
不同方位角的瀑布显示说明了我们的系统如何在不同时间和范围内检测目标,与我们的动作完美匹配
这是SPAPT二维成像的示例。我们固定目标位置并旋转相位器。0度参考轴指向上方。
在左侧面板中,您会看到2.4米处的图像被截断,角反射器出现在图像的左侧。同时,在右侧面板中,3米处的图像显示反射器位于相位器的右侧。
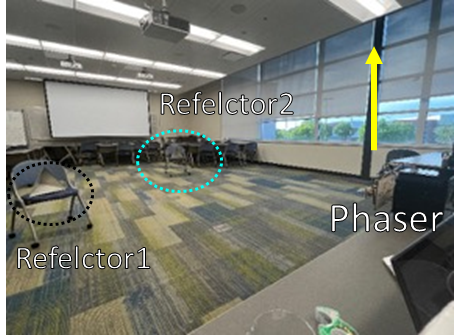
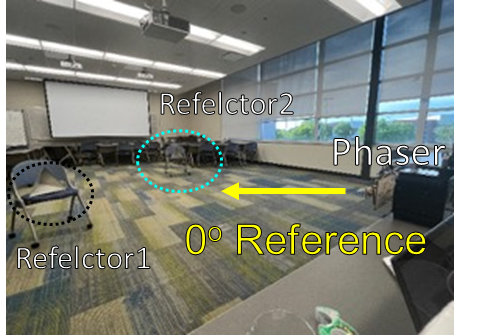
在这种情况下,目标被放置在相同的位置,但我们已将参考轴调整为指向左侧。
因此,在左侧面板上,您会注意到反射器出现在图像的顶部,而在右侧面板上,3米目标出现在图像的底部。
这表明,尽管相位器的角度分辨率有限(约为28度),但它能够从两个方向分辨目标。
总而言之,我们探索了SPAPT作为一种有前景的低成本雷达层析成像解决方案。虽然它展现出巨大的潜力,但仍需要解决诸如处理复杂目标以及目前无法支持多普勒处理等挑战。我们正在努力进一步增强SPAPT的功能。感谢您的关注。如需了解更多详细信息以及我们相位器GUI的源代码。