您的购物车目前是空的!
作者: zhao xudong
-
鲍尔航空航天:无源雷达
原作者代码
No
研究团队
- Mason Stone
- Matt Pierce
无源雷达概念
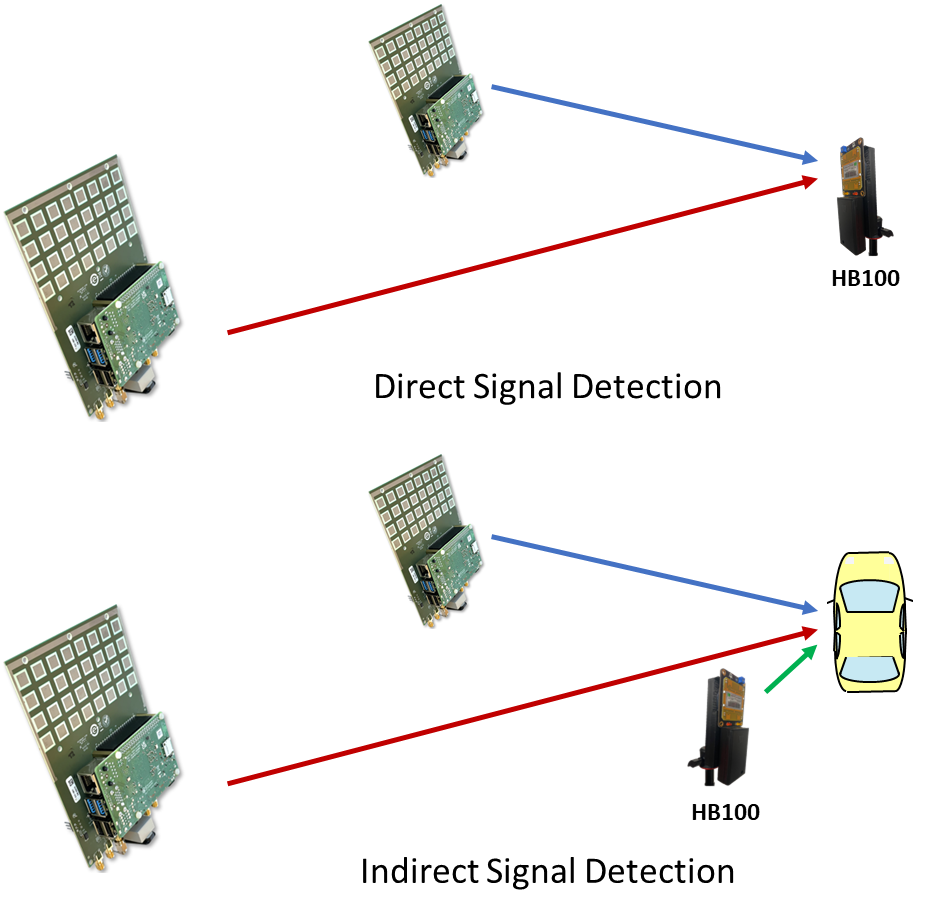
- 无源雷达利用电磁频谱中的信号
- 信号可以直接或间接检测
- 定位可以通过多种方式实现:
- 两个独立的接收器进行三角测量
- 一个接收器在位置和时间上移动
- 演示采用的是直接检测方案,带有两个相位器
三角测量
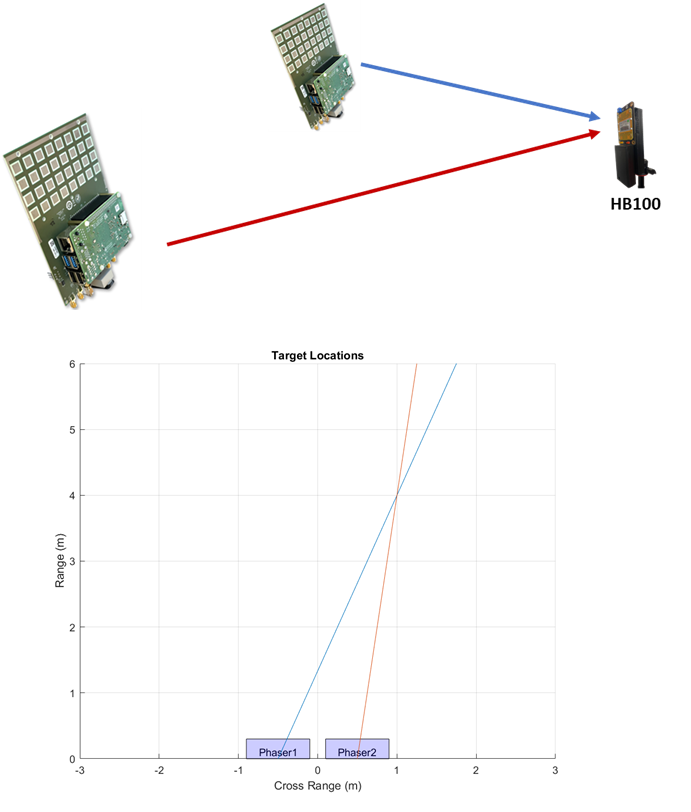
- 每个相位器的位置已知
- 测量与发射器的角度
- 相位器方位角扫描范围为 -60° 至 60°
- 使用单脉冲角度测量可提高精度
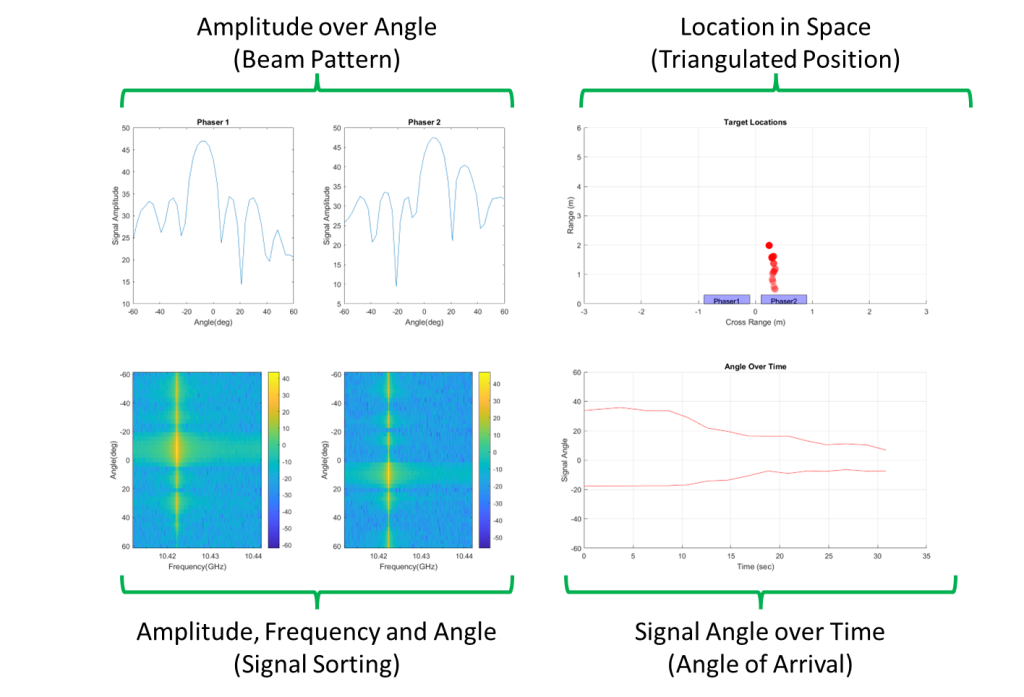
多个信号
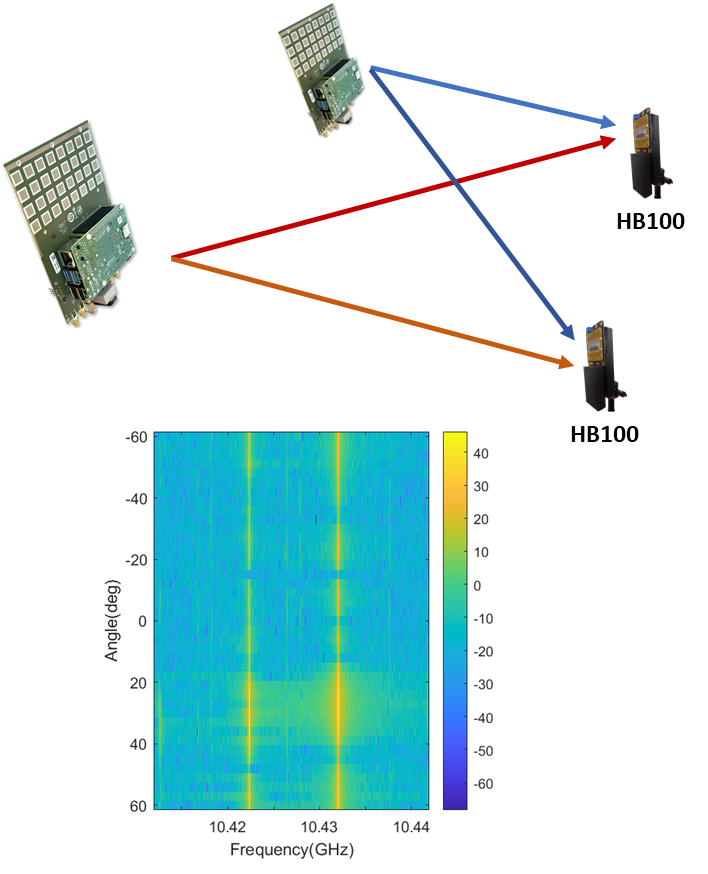
- 测量每个发射器的频率和幅度
- 信号按频率在一定范围内排序
- 频率与角度的扫描由一个移相器完成
追踪
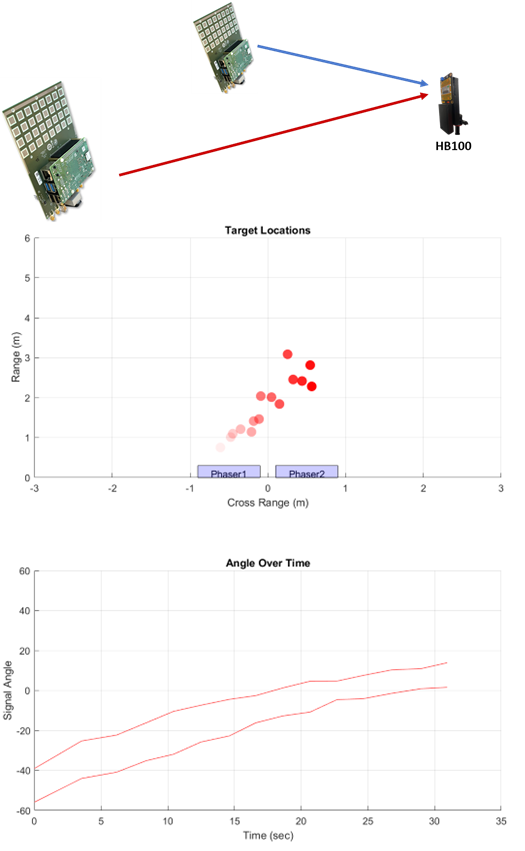
- 已排序的信号会随时间推移进行跟踪
- 每次相位器扫描时,都会计算每个相位器的角度
- 位置会绘制在二维空间中
- “目标位置”中的红点代表一个正在后退的目标。
- 请注意,最近的撞击点颜色较暗,并且会随着时间的推移而逐渐暗淡
GUI
-
阿拉巴马大学:对无人机进行单 CPI 分类
原作者代码
https://gitee.com/tekdf/2024_IEEE_Radar_Challenge
研究团队
- Sean J. Kearney
- Josh Haeker
- Emily Curl
问题陈述
需要利用短时间内收集的数据来检测不明无人机(UAV)
目标

- MetaBird
- Syma 遥控直升机
- 电动螺旋桨
- DEERC 四轴飞行器
雷达数据
- X波段雷达
- 使用MATLAB运行
- 最大探测距离 = 2米
- 最大速度 = 5米/秒
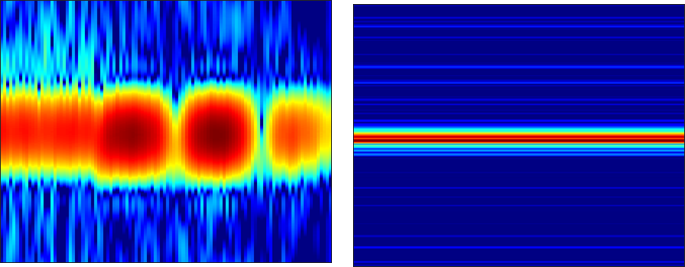
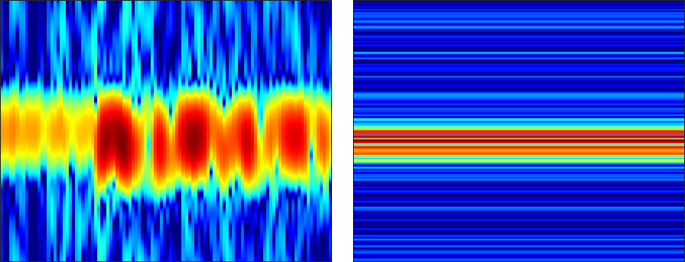
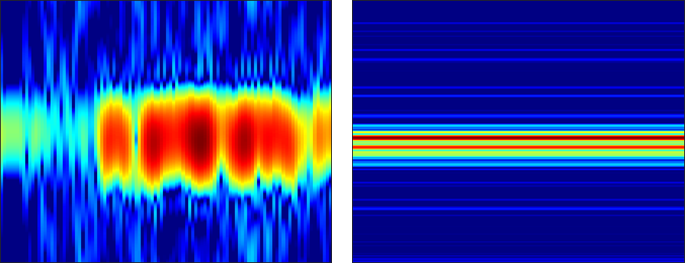
- 频谱图:
- STFT
- 窗口大小:短窗口 vs. 长窗口
- Bin 大小:10 vs. 267
- 重叠:8 vs. 250
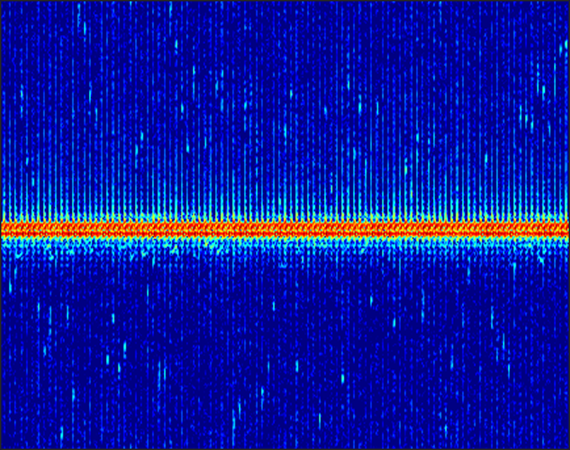
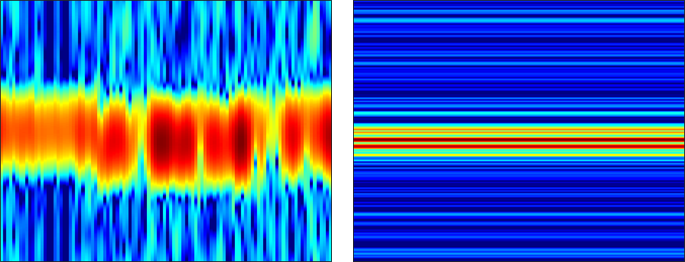
长窗口四轴飞行器的STFT 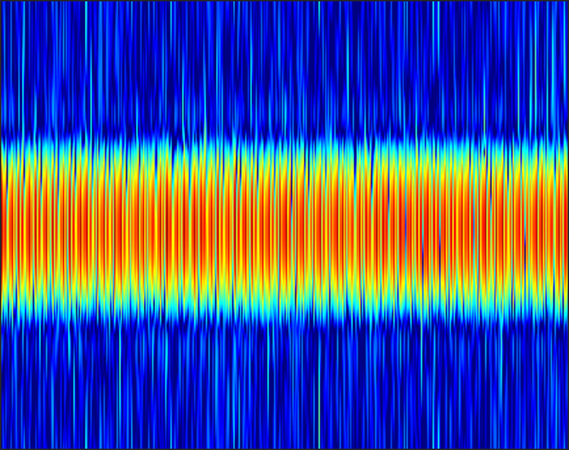
短窗口四轴飞行器的STFT 分类网络
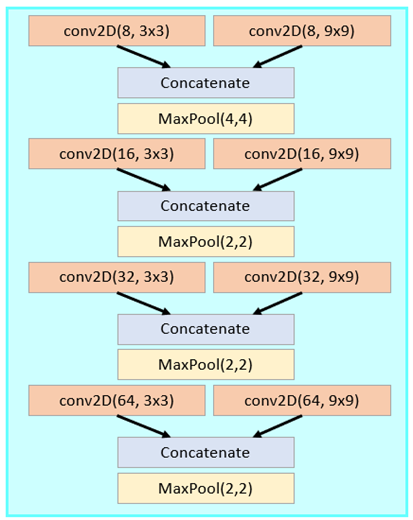
- 编码器 – 4 层
- 2 个卷积
- 卷积级联
- 最大池化
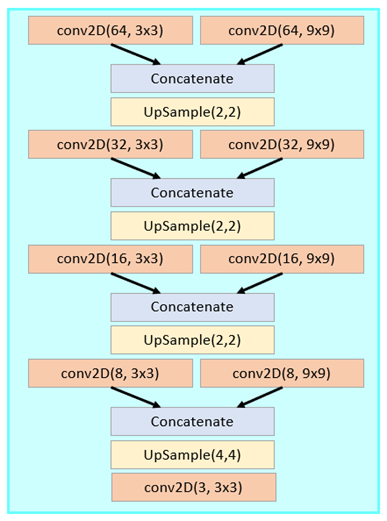
- 解码器 – 4 层
- 2 卷积
- 卷积级联
- 二维上采样
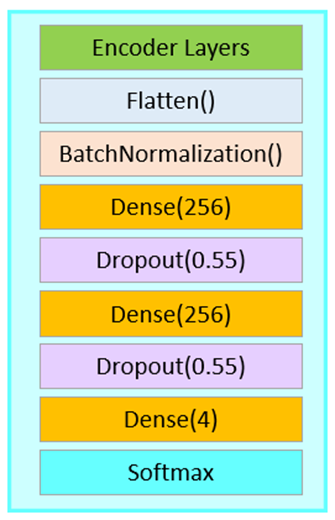
- 分类编码器
- 训练好的编码器,后接全连接层和softmax层
跨 100 个 CPI 进行分类
- 每个目标 9 个样本
- 长窗口
- 准确率 = 13.3%
- 短窗口
- 准确率 = 40%
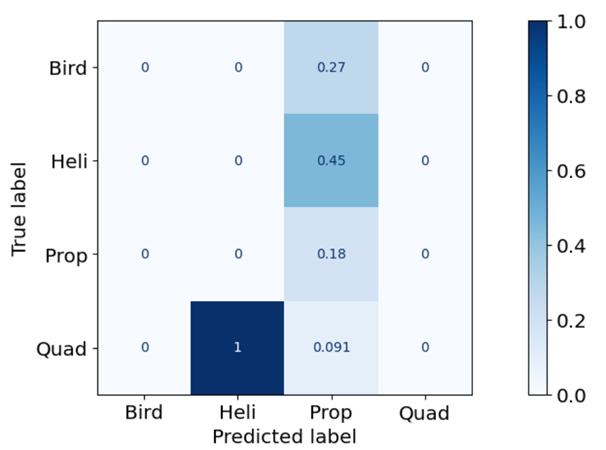
长窗口混淆矩阵 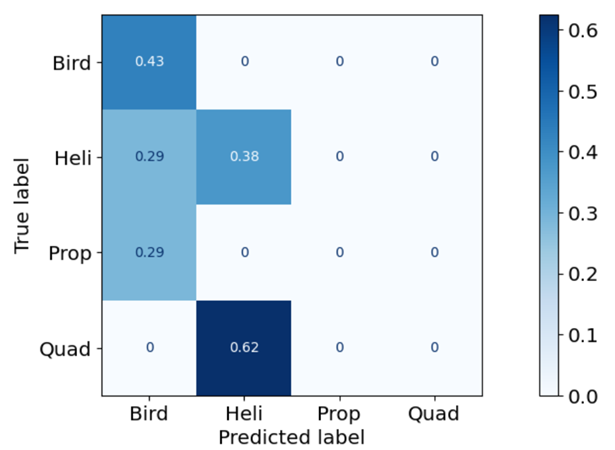
短窗口混淆矩阵 跨 1 个 CPI 的分类
- 每个目标 900 个样本
- 长窗口
- 准确率 = 84.4%
- 短窗口
- 准确率 = 97.6%
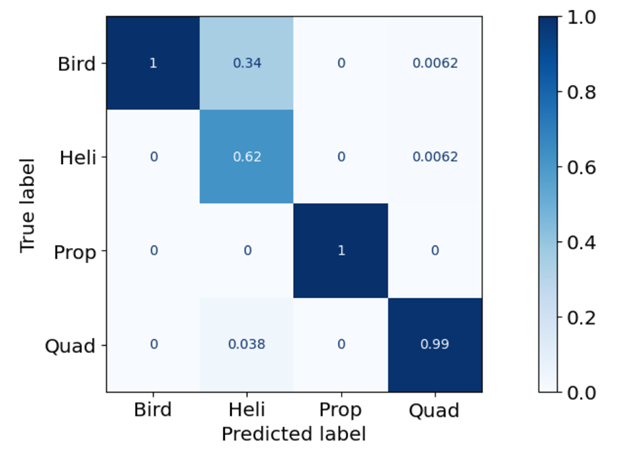
长窗口混淆矩阵 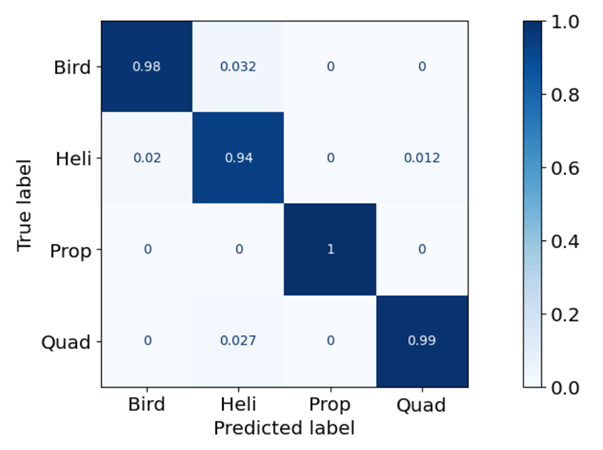
短窗口混淆矩阵 结论
- Phaser X 波段雷达可探测无人机特征
- 单次 CPI 无人机探测可提升训练数据集大小,进而提高模型分类准确率
- 单次 CPI 叶片闪光与 HERM 线的有效性对比
未来工作
- 远距离探测
- 不同 CPI 数量下的同等大小数据集如何比较?
- 环境中的噪声如何影响 Blade Flash?
附录
单个 CPI 频谱图
Bird (window 10 vs 200)
Heli (window 10 vs 200)
Propeller (window 10 vs 200)
Quad (window 10 vs 200)