您的购物车目前是空的!
作者: zhao xudong
-
AI-RAN : SDR X410 配置
Spark 配置
安装Sionna-rk
git clone https://github.com/NVlabs/sionna-rk.git cd sionna-rk安装UHD(Orin平台请勿使用)
sudo apt install -y \ autoconf automake build-essential ccache cmake cpufrequtils \ doxygen ethtool g++ git inetutils-tools libboost-all-dev \ libncurses6 libncurses-dev libusb-1.0-0 libusb-1.0-0-dev \ libusb-dev python3-dev python3-mako python3-numpy python3-requests \ python3-scipy python3-setuptools python3-ruamel.yaml ninja-build git clone https://github.com/EttusResearch/uhd.git cd host mkdir build && cd build cmake -DCMAKE_POLICY_DEFAULT_CMD0167=NEW -GNinja .. ninja ninja test sudo ninja install需要建立Python的索引
cd /usr/lib/python3/dist-packages sudo vim uhd.pth /usr/local/lib/python3.12/site-packages查看GPU信息
nvidia-smiGPU信息显示如下:
Thu Nov 27 19:33:48 2025 +-----------------------------------------------------------------------------------------+ | NVIDIA-SMI 580.95.05 Driver Version: 580.95.05 CUDA Version: 13.0 | +-----------------------------------------+------------------------+----------------------+ | GPU Name Persistence-M | Bus-Id Disp.A | Volatile Uncorr. ECC | | Fan Temp Perf Pwr:Usage/Cap | Memory-Usage | GPU-Util Compute M. | | | | MIG M. | |=========================================+========================+======================| | 0 NVIDIA GB10 On | 0000000F:01:00.0 On | N/A | | N/A 42C P0 5W / N/A | Not Supported | 0% Default | | | | N/A | +-----------------------------------------+------------------------+----------------------+安装 cupy
pip install cupy-cuda13x --break-system-packages如果要让Spark的网口速率固定为10G,请执行指令
sudo ethtool -s enP2p1s0f0np0 speed 10000 duplex full autoneg off检查速率
sudo ethtool enP2p1s0f0np0 | grep -i speed因为不存在速率自动协商的功能,所以需要手动配置好。
软件无线电 X410 配置
当你第一次拿到软件无线电X410的时候,请按照下图所示的常规的连接方法进行接线。
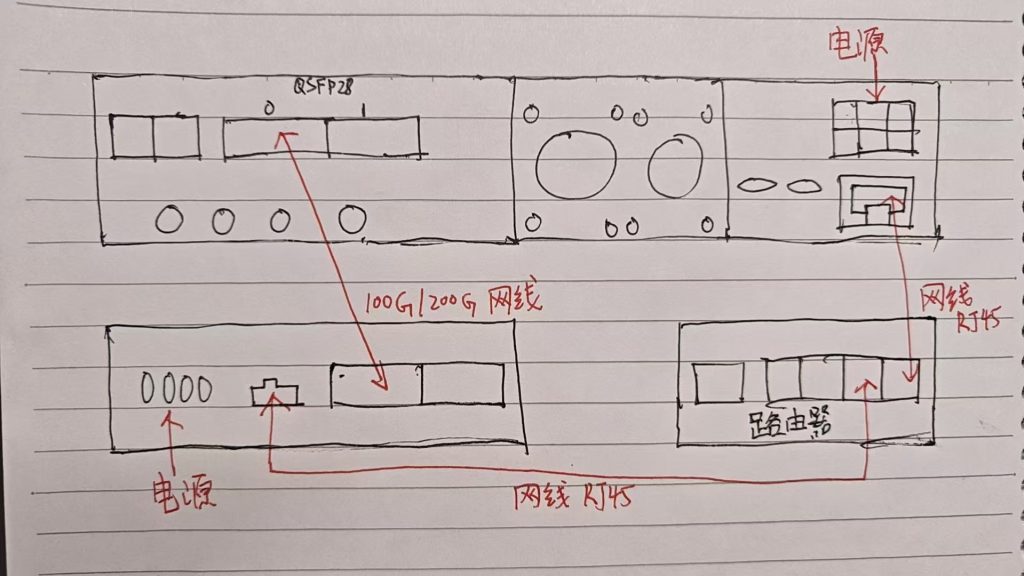
- 将Spark和X410都连接到同一台路由器中。
- X410的QSFP28口1和Spark的网口进行连接,注意正反。
在Spark中启动一下终端,然后在终端中运行
uhd_find_devices会得到如下的输出
airan1@spark-bbdd:~$ uhd_find_devices [INFO] [UHD] linux; GNU C++ version 13.3.0; Boost_108300; UHD_4.9.0.0-75-g0f522267 -------------------------------------------------- -- UHD Device 0 -------------------------------------------------- Device Address: serial: XXXXXXX addr: 192.168.0.104 claimed: False fpga: X4_200 mgmt_addr: 192.168.0.104 product: x410 type: x4xx然后输入指令进入终端
airan1@spark-bbdd:~$ ssh root@192.168.0.104 The authenticity of host '192.168.0.104 (192.168.0.104)' can't be established. ED25519 key fingerprint is SHA256:tu6m3SUsvFbVQxtLQiGBU/5BuEO3QexkXl4BNUh+Ye0. This key is not known by any other names. Are you sure you want to continue connecting (yes/no/[fingerprint])? yes Warning: Permanently added '192.168.0.104' (XXXXXXX) to the list of known hosts.进入终端之后,也可以查看设备信息
root@xx-x4xx-XXXXXXX:~# uhd_find_devices [INFO] [UHD] linux; GNU C++ version 9.2.0; Boost_107100; UHD_4.1.0.7-0-g8f9508f7 -------------------------------------------------- -- UHD Device 0 -------------------------------------------------- Device Address: serial: XXXXXXX claimed: False fpga: X4_200 mgmt_addr: 127.0.0.1 product: x410 type: x4xx完成之后,可以看到UHD得版本是4.1,可以来下载完整的镜像
root@xx-x4xx-XXXXXXX:~# uhd_images_downloader下载完成之后,可以查看下载好的镜像
root@xx-x4xx-XXXXXXX:~# ls /usr/share/uhd/images/在4.1版本中,是只能看到“X4_200”
为了能在Spark中使用,那么就需要安装和Spark一样的UHD版本。
更新文件系统
root@xx-x4xx-XXXXXXX:~# usrp_update_fs -t master /usr/lib/python3.7/site-packages/usrp_mpm/rpc_server.py:24: MonkeyPatchWarning: Monkey-patching ssl after ssl has already been imported may lead to errors, including RecursionError on Python 3.6. It may also silently lead to incorrect behaviour on Python 3.7. Please monkey-patch earlier. See https://github.com/gevent/gevent/issues/1016. Modules that had direct imports (NOT patched): ['urllib3.contrib.pyopenssl (/usr/lib/python3.7/site-packages/urllib3/contrib/pyopenssl.py)']. monkey.patch_all() Downloading manifest file from https://raw.githubusercontent.com/EttusResearch/uhd/master/images/manifest.txt... [INFO] Using base URL: https://files.ettus.com/binaries/cache/ [INFO] Images destination: /usr/share/uhd/images [INFO] Using manifest file at location: /tmp/tmpsb7jmy6_/manifest.txt The file size for this target (438.3 MiB) exceeds the download limit (100.0 MiB). Continue downloading? [y/N]y 459548 kB / 459548 kB (100%) x4xx_common_mender_default-v4.9.0.0.zip [INFO] Images download complete. INFO[0000] Loaded configuration file: /etc/mender/mender.conf INFO[0000] Mender running on partition: /dev/mmcblk0p2 INFO[0000] Start updating from local image file: [/usr/share/uhd/images/usrp_x4xx_fs.mender] Installing Artifact of size 466179072... INFO[0000] No public key was provided for authenticating the artifact INFO[0000] Update Module path "/usr/share/mender/modules/v3" could not be opened (open /usr/share/mender/modules/v3: no such file or directory). Update modules will not be available INFO[0000] Opening device "/dev/mmcblk0p3" for writing INFO[0000] Native sector size of block device /dev/mmcblk0p3 is 512 bytes. Mender will write in chunks of 1048576 bytes ................................ 0% 1024 KiB ................................ 0% 2048 KiB ................................ 0% 3072 KiB ................................ 0% 4096 KiB ................................ 1% 5120 KiB ................................ 1% 6144 KiB ................................ 1% 7168 KiB ................................ 1% 8192 KiB ................................ 2% 9216 KiB ................................ X ................................ X ................................ 97% 444416 KiB ................................ 97% 445440 KiB ................................ 98% 446464 KiB ................................ 98% 447488 KiB ................................ 98% 448512 KiB ................................ 98% 449536 KiB ................................ 98% 450560 KiB ................................ 99% 451584 KiB ................................ 99% 452608 KiB ................................ 99% 453632 KiB ................................ 99% 454656 KiB ..................INFO[0153] All bytes were successfully written to the new partition INFO[0153] The optimized block-device writer wrote a total of 3769 frames, where 1516 frames did need to be rewritten (i.e., skipped) INFO[0155] Wrote 3951034368/3951034368 bytes to the inactive partition 100% 455253 KiB INFO[0155] Enabling partition with new image installed to be a boot candidate: 3 Use -commit to update, or -rollback to roll back the update. At least one payload requested a reboot of the device it updated. Applied image. After reboot, check if everything works, and then run the command '$ mender -commit' to confirm (otherwise, this update will be undone). Note: Any data stored in this partition will be not accessible after reboot. Reboot now? [Yn] y Will reboot now. Hit Ctrl-C before the countdown expires to cancel. Rebooting in 3... 2... 1... Connection to 192.168.0.104 closed by remote host. Connection to 192.168.0.104 closed.也可以指定UHD版本
usrp_update_fs -t v4.7.0.0清除ssh的垃圾信息
ssh-keygen -f '/home/airan1/.ssh/known_hosts' -R '192.168.0.104'重新ssh登陆X410
root@xx-x4xx-XXXXXXX:~# uhd_find_devices [INFO] [UHD] linux; GNU C++ version 11.5.0; Boost_107800; UHD_4.9.0.0-0-g006d7f76 -------------------------------------------------- -- UHD Device 0 -------------------------------------------------- Device Address: serial: XXXXXXX claimed: False fpga: X4_200 mgmt_addr: 127.0.0.1 name: xx-x4xx-XXXXXXX product: x410 type: x4xx查看对应的固件信息
root@xx-x4xx-XXXXXXX:~# ls /usr/share/uhd/images/ inventory.json usrp_x410_fpga_UC_200.dts.md5 usrp_x440_fpga_CG_1600.dts usrp_x440_fpga_X4_1600.bit.md5 usrp_x440_fpga_X4_400.bit usrp_x410_fpga_CG_400.bit usrp_x410_fpga_UC_200.rpt usrp_x440_fpga_CG_1600.dts.md5 usrp_x440_fpga_X4_1600.dts usrp_x440_fpga_X4_400.bit.md5 usrp_x410_fpga_CG_400.bit.md5 usrp_x410_fpga_X4_200.bit usrp_x440_fpga_CG_1600.rpt usrp_x440_fpga_X4_1600.dts.md5 usrp_x440_fpga_X4_400.dts usrp_x410_fpga_CG_400.dts usrp_x410_fpga_X4_200.bit.md5 usrp_x440_fpga_CG_400.bit usrp_x440_fpga_X4_1600.rpt usrp_x440_fpga_X4_400.dts.md5 usrp_x410_fpga_CG_400.dts.md5 usrp_x410_fpga_X4_200.dts usrp_x440_fpga_CG_400.bit.md5 usrp_x440_fpga_X4_200.bit usrp_x440_fpga_X4_400.rpt usrp_x410_fpga_CG_400.rpt usrp_x410_fpga_X4_200.dts.md5 usrp_x440_fpga_CG_400.dts usrp_x440_fpga_X4_200.bit.md5 usrp_x410_fpga_UC_200.bit usrp_x410_fpga_X4_200.rpt usrp_x440_fpga_CG_400.dts.md5 usrp_x440_fpga_X4_200.dts usrp_x410_fpga_UC_200.bit.md5 usrp_x440_fpga_CG_1600.bit usrp_x440_fpga_CG_400.rpt usrp_x440_fpga_X4_200.dts.md5 usrp_x410_fpga_UC_200.dts usrp_x440_fpga_CG_1600.bit.md5 usrp_x440_fpga_X4_1600.bit usrp_x440_fpga_X4_200.rpt固件类型
FPGA Image Flavor Number of
ChannelsBandwidth
per ChannelQSFP28 Port 0 Interface QSFP28 Port 1 Interface DDC/DUC DRAM X4_200 4 (2 per ZBX) 200 MHz 4x 10 GbE (All Lanes) Unused Yes Yes (4 GiB, 4-Ch Replay) UC_200 4 (2 per ZBX) 200 MHz Unused 100 GbE Yes Yes (4 GiB, 4-Ch Replay) CG_400 4 (2 per ZBX) 400 MHz 100 GbE 100 GbE No No 烧写支持100G的固件
root@xx-x4xx-XXXXXXX:~# uhd_image_loader --args "type=x4xx,mgmt_addr=127.0.0.1,fpga=CG_400" [INFO] [UHD] linux; GNU C++ version 11.5.0; Boost_107800; UHD_4.9.0.0-0-g006d7f76 [INFO] [MPMD] Initializing 1 device(s) in parallel with args: mgmt_addr=127.0.0.1,type=x4xx,product=x410,serial=XXXXXXX,name=xx-x4xx-XXXXXXX,fpga=X4_200,claimed=False,skip_init=1 [INFO] [MPM.main] Launching USRP/MPM, version: 4.9.0.0-g006d7f76 [INFO] [MPM.main] Spawning RPC process... [INFO] [MPM.PeriphManager] Device serial number: XXXXXXX [INFO] [MPM.PeriphManager.ClkMgr] Using Clock Configuration: DB0: Master Clock Rate: 245.76 MSps @Converter Rate 2.94912 GHz DB1: Master Clock Rate: 245.76 MSps @Converter Rate 2.94912 GHz [INFO] [MPM.PeriphManager] Initialized 2 daughterboard(s). [INFO] [MPM.PeriphManager] init() called with device args `boot_init=True,clock_source=internal,time_source=internal,initializing=True'. [INFO] [MPM.RPCServer] RPC server ready! [INFO] [MPM.RPCServer] Spawning watchdog task... [INFO] [MPMD] Claimed device without full initialization. [INFO] [MPMD IMAGE LOADER] Starting update. This may take a while. [INFO] [MPM.PeriphManager] Installing component `fpga' [INFO] [MPM.PeriphManager] Installing component `dts' [INFO] [MPM.RPCServer] Resetting peripheral manager. [INFO] [MPM.PeriphManager] Device serial number: XXXXXXX [INFO] [MPM.PeriphManager.ClkMgr] Using Clock Configuration: DB0: Master Clock Rate: 491.52 MSps @Converter Rate 2.94912 GHz DB1: Master Clock Rate: 491.52 MSps @Converter Rate 2.94912 GHz [INFO] [MPM.PeriphManager] Initialized 2 daughterboard(s). [INFO] [MPM.PeriphManager] init() called with device args `boot_init=True,clock_source=internal,time_source=internal,initializing=True'. [INFO] [MPMD IMAGE LOADER] Update component function succeeded. [INFO] [MPMD] Initializing 1 device(s) in parallel with args: mgmt_addr=127.0.0.1,type=x4xx,product=x410,serial=XXXXXXX,name=xx-x4xx-XXXXXXX,fpga=CG_400,claimed=False,find_all=1 [INFO] [MPM.PeriphManager] init() called with device args `find_all=1,fpga=CG_400,mgmt_addr=127.0.0.1,name=xx-x4xx-XXXXXXX,product=x410,clock_source=internal,time_source=internal,initializing=True'. [INFO] [0/Radio#0] Clocking reconfigured, running ADC Self Cal on DB0... [INFO] [0/Radio#0] Calibrating channel 0... [INFO] [0/Radio#0] Calibrating channel 1... [INFO] [0/Radio#0] Calibrated 2 channels. [INFO] [0/Radio#1] Clocking reconfigured, running ADC Self Cal on DB1... [INFO] [0/Radio#1] Calibrating channel 2... [INFO] [0/Radio#1] Calibrating channel 3... [INFO] [0/Radio#1] Calibrated 2 channels.再次查看固件的版本
root@xx-x4xx-XXXXXXX:~# uhd_find_devices [INFO] [UHD] linux; GNU C++ version 11.5.0; Boost_107800; UHD_4.9.0.0-0-g006d7f76 -------------------------------------------------- -- UHD Device 0 -------------------------------------------------- Device Address: serial: XXXXXXX claimed: False fpga: CG_400 mgmt_addr: 127.0.0.1 name: xx-x4xx-XXXXXXX product: x410 type: x4xx重启之后,是需要确认固件的,请执行该指令
root@xx-x4xx-XXXXXXX:~# mender commit INFO[0000] Loaded configuration file: /etc/mender/mender.conf INFO[0000] 'UpdateControlMapExpirationTimeSeconds' is not set in the Mender configuration file. Falling back to the default of 2*UpdatePollIntervalSeconds INFO[0000] 'UpdateControlMapBootExpirationTimeSeconds' is not set in the Mender configuration file. Falling back to the default of 600 seconds INFO[0000] Mender running on partition: /dev/mmcblk0p3 Committing Artifact... INFO[0000] Executing script: ArtifactCommit_Enter_10_migrate-configuration INFO[0000] Committing update在Spark中可以开启100G网口通道
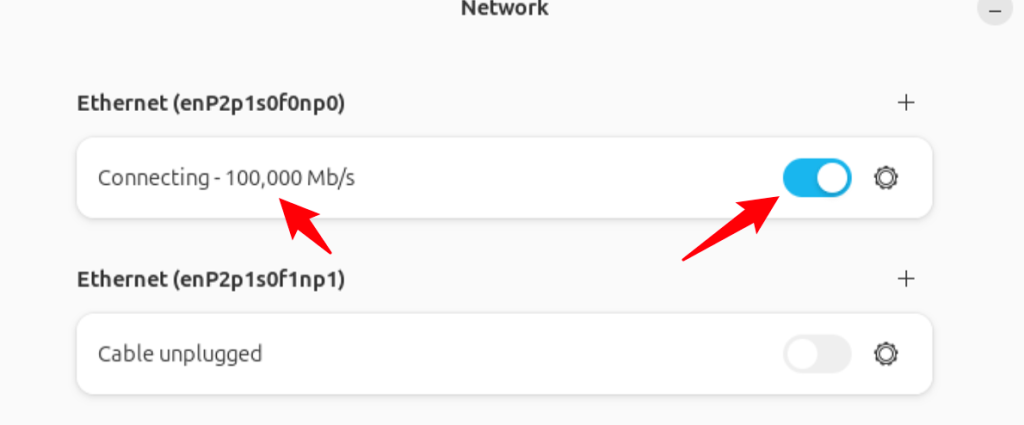
配置100G网口的IP地址
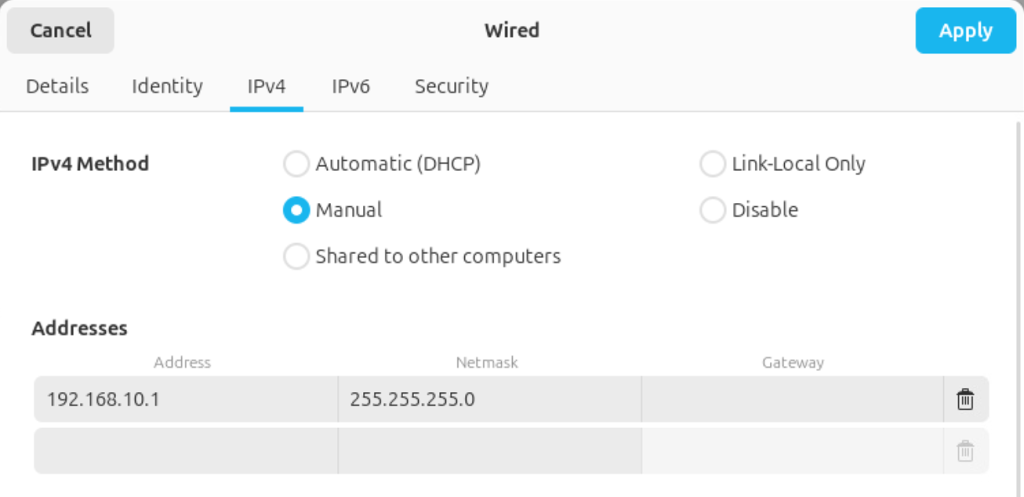
注意IP地址:
Interface Name Description Default Configuration Configuration File X4_xxx FPGA image CG_xxx FPGA image eth0RJ45 DHCP eth0.network DHCP DHCP int0Internal 169.254.0.1/24 int0.network 169.254.0.1/24 169.254.0.1/24 sfp0QSFP28 0 (4-lane interface or lane 0) 192.168.10.2/24 sfp0.network 192.168.10.2/24 192.168.10.2/24 sfp0_1QSFP28 0 (lane 1) 192.168.11.2/24 sfp0_1.network 192.168.11.2/24 N/A sfp0_2QSFP28 0 (lane 2) 192.168.12.2/24 sfp0_2.network 192.168.12.2/24 N/A sfp0_3QSFP28 0 (lane 3) 192.168.13.2/24 sfp0_3.network 192.168.13.2/24 N/A sfp1QSFP28 1 (4-lane interface or lane 0) 192.168.20.2/24 sfp1.network N/C 192.168.20.2/24 sfp1_1QSFP28 1 (lane 1) 192.168.21.2/24 sfp1_1.network N/C N/A sfp1_2QSFP28 1 (lane 2) 192.168.22.2/24 sfp1_2.network N/C N/A sfp1_3QSFP28 1 (lane 3) 192.168.23.2/24 sfp1_3.network N/C N/A 切换到Spark中,在Spark的终端中运行
airan1@spark-bbdd:~$ uhd_find_devices [INFO] [UHD] linux; GNU C++ version 13.3.0; Boost_108300; UHD_4.9.0.0-75-g0f522267 -------------------------------------------------- -- UHD Device 0 -------------------------------------------------- Device Address: serial: XXXXXXX addr: 192.168.10.2 claimed: False fpga: CG_400 mgmt_addr: 192.168.0.104 mgmt_addr: 192.168.10.2 name: xx-x4xx-XXXXXXX product: x410 type: x4xx在输出中是可以看到已经显示出100G网口的IP信息了。
安装一下Gnuradio
sudo apt install gnuradio运行基础的频谱软件
uhd_fft -f 2450M -s 500M运行在cpu的软件,会存在一些丢包情况,不够连续。
系统配置
方法一,修改缓冲区的大小
sudo sysctl -w net.core.rmem_max=250000000 sudo sysctl -w net.core.wmem_max=250000000查看修改之后的数值
sysctl net.core.rmem_max sysctl net.core.wmem_max方法二,持久化该配置
sudo nano /etc/sysctl.d/uhd.conf写入如下的内容
net.core.rmem_max = 250000000 net.core.wmem_max = 250000000保存后执行:
sudo sysctl --system开启SCTP内核
sudo modprobe sctp lsmod | grep sctp echo sctp | sudo tee /etc/modules-load.d/sctp.confDocker增加信息
# Add Docker's official GPG key: sudo install -m 0755 -d /etc/apt/keyrings sudo curl -fsSL https://download.docker.com/linux/ubuntu/gpg -o /etc/apt/keyrings/docker.asc sudo chmod a+r /etc/apt/keyrings/docker.asc # Add the repository to Apt sources: echo \ "deb [arch=$(dpkg --print-architecture) signed-by=/etc/apt/keyrings/docker.asc] https://download.docker.com/linux/ubuntu \ $(. /etc/os-release && echo "${UBUNTU_CODENAME:-$VERSION_CODENAME}") stable" | \ sudo tee /etc/apt/sources.list.d/docker.list > /dev/null sudo nvidia-ctk runtime configure --runtime=docker sudo systemctl restart docker sudo usermod -aG docker $USER加载镜像
docker load -i oai-amf-v2.1.0-1.2.tar docker load -i oai-ausf-v2.1.0-1.2.tar docker load -i oai-gnb-cuda.tar docker load -i oai-lmf-v2.1.0-1.2.tar docker load -i oai-nrf-v2.1.0-1.2.tar docker load -i oai-nr-ue-cuda.tar docker load -i oai-nssf-v2.1.0-1.2.tar docker load -i oai-smf-v2.1.0-1.2.tar docker load -i oai-udm-v2.1.0-1.2.tar docker load -i oai-udr-v2.1.0-1.2.tar docker load -i oai-upf-v2.1.0-1.2.tar docker load -i ran-base-cuda.tar docker load -i ran-build-cuda.tar docker load -i trf-gen-cn5g.tar docker load -i mysql-8-0.tarPython API使用
创建USRP对象
import uhd # X310、X410、Nxx系列单台设备 usrp = uhd.usrp.MultiUSRP("addr=192.168.10.2") # X310、X410、Nxx系列多台设备 usrp = uhd.usrp.MultiUSRP("addr=192.168.10.2,addr=192.168.10.3") # B210系列单台和多台 usrp = uhd.usrp.MultiUSRP("serial=XXXXXX1,serial=XXXXXX2")配置参考时钟(10 MHz 和 PPS)
usrp.set_clock_source("external") usrp.set_time_source("external")或者
usrp.set_clock_source("gpsdo") usrp.set_time_source("gpsdo")接收信号
samps = usrp.recv_num_samps( 1e6, # Number of samples 2.4e9, # Frequency in Hz 1e6, # Sampling rate [0], # Receive on channel 0 80, # 80 dB of RX gain ) -
Gravity:数字 10.525GHz 微波传感器(运动检测)






介绍
10.525GHz 微波运动传感器利用多普勒效应,通过微波来探测运动物体。这与普通的红外(IR)传感器的工作方式不同,因为微波对多种能够反射微波的物体敏感,并且其传感器读数不会受到环境温度的影响。
这种类型的微波传感器被广泛应用于工业、交通和民用领域,例如:车辆速度测量、液位检测、自动门运动检测、自动清洗、生产线物料检测以及汽车倒车雷达等。
微波检测方法相较于其他方法具有以下优势:
- 非接触检测
- 测量结果不受温度、湿度、噪声、空气、灰尘或光线影响 —— 适用于恶劣环境
- 对射频干扰有很强的抵抗力
- 输出功率低,对人体无害
- 探测范围广,速度高
- 支持非生命物体检测
应用
微波传感器可以与其他传感器配合使用,以提升测量精度。例如,它可以降低人体运动检测中的误报率,并在安防和安全工作中表现出色。
技术规格
工作电压: 5V ± 0.25V
工作电流(连续波 CW): 最大 60mA,典型 37mA
接口: Gravity 3针接口(数字)
尺寸: 48.5 × 63mm发射参数
- 探测距离: 2–16 米连续可调
- 发射频率: 10.525 GHz
- 精确频率设定: 3 MHz
- 输出功率(最小值): 13dBm EIRP
- 谐波发射: < -10dBm
- 平均电流(5% 占空比): 典型 2mA
- 脉冲宽度(最小): 5 微秒
- 负载周期(最小): 1%
接收参数
- 灵敏度(10dB 信噪比): 3Hz – 80Hz
- 带宽: -86dBm
- 3Hz – 80Hz 带宽杂波: 10uV
- 天线增益: 8dBi
- 垂直 3dB 波束宽度: 36°
- 水平 3dB 波束宽度: 72°
板卡概述
天线说明
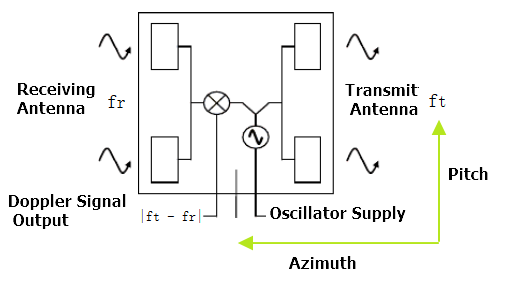
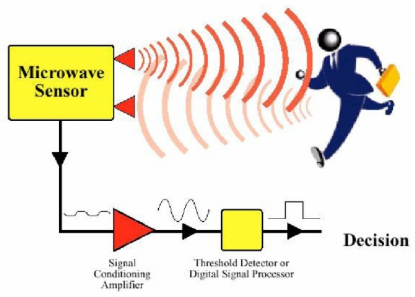
信号处理
下图展示了该传感器模块的工作原理。它通过放大由微波传感器接收到的微弱信号,然后经过比较电路,将信号转换为方波信号,并以数字输出 0 或 1 的形式输出,从而便于 Arduino 或其他微控制器进行处理。
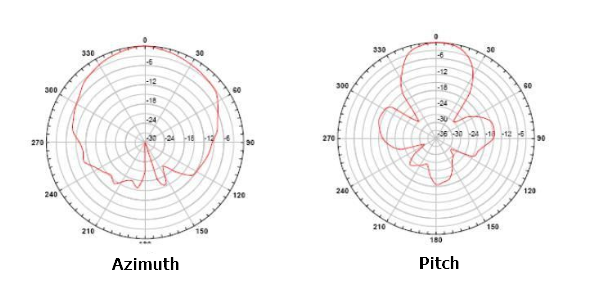
信号检测范围
检测角度:当天线处于水平方向(方位角)时,检测角度为 72°;在天线的垂直方向(俯仰角)上,检测角度为 36°。
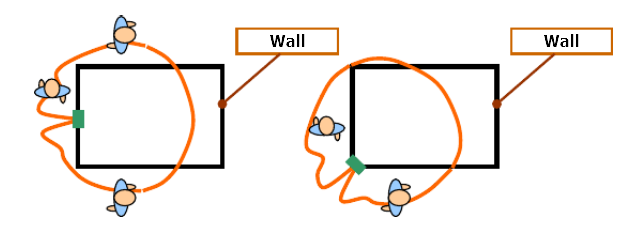
安装
微波可以穿透墙壁。因此,当微波穿透外墙并检测到非目标区域的移动物体时,有时会产生不准确的情况。请务必选择合适的安装位置以避免这种情况!
指示灯与输出状态
当微波传感器未检测到运动物体时,指示 LED 保持熄灭状态。
当传感器检测到运动物体时,LED 会点亮,输出电平从 HIGH 变为 LOW。大约 0.5 秒后,LED 会自动熄灭,输出电平从 LOW 变为 HIGH。
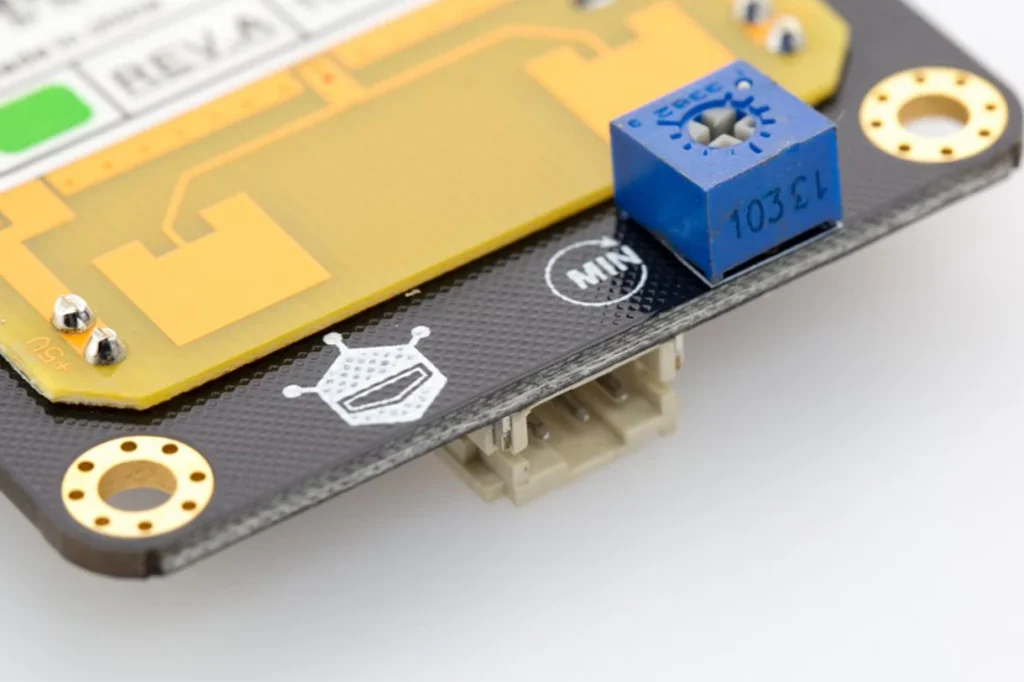
如果传感器持续检测到运动物体,LED 将不断闪烁,输出电平将在 HIGH 和 LOW 之间来回波动,直到物体停止移动。距离调节
微波传感器的检测距离范围为 2–16 米。可通过电位器调节检测距离。
若电位器旋转至 MIN 方向,检测距离减小;若向相反方向旋转,检测范围则会增大。