您的购物车目前是空的!
作者: zhao xudong
-
光宝 FR1 O-RU 数据手册

1. 关键特性与优势(Key Features & Benefits)
FlexFi Sub-6 O-RU
1.1. 应用与标准支持
- 支持 3GPP Release 15:SA(独立组网)模式
- 支持 O-RAN Option 7.2
- 支持 最多 64 个活跃用户
- 支持 eCPRI 与 O-RAN 开放前传接口终止
1.2. 低 PHY 功能(Low-PHY)
- FFT(快速傅里叶变换)
- PRACH 滤波
- DFE(数字前端)
1.3. 射频部分
- RF 收发器
- RFFE(射频前端)
1.4. 系统优势
- 高度灵活
- 高能效
- 开放式架构
- 即插即用,部署便捷
- 智能化与自动化能力
1.5. 典型应用场景
- 商用行业
- 酒店与商业综合体
- 物联网(IoT)
2. 规格参数(Specification)
项目 参数 型号 FF-RFI077I4 / FF-RFI078I4 / FF-RFI079I4 频段 n77:3.8~4.2 GHz;n78:3.3~3.8 GHz;n79:4.4~5.0 GHz 3GPP 规范符合性 Release 15,5G SA 双工方式 TDD 带宽 最高 100 MHz 天线类型 内置天线 射频发射功率 总功率 1 W,每通道 24 dBm MIMO 阶数 4×4 MIMO 收发通道 4T4R 调制方式 下行:256 QAM;上行:64 QAM 时间同步源 GNSS、IEEE 1588v2、Sync-E 前传接口 10G SFP+,1G RJ45 防护等级 室内:IP20 工作温度 −5 ℃ ~ 45 ℃ 工作湿度 5% ~ 95% 供电 54 V 直流 功耗 65 W 尺寸 252 × 252 × 62.7 mm OAM 功能 支持 LITEON LiteNetics:FM、CM、AM、PM、SM RIC 管理 O1 接口:非实时 RIC 活跃用户数 支持 64 个活跃用户 部署方式 室内 安装方式 壁挂或吸顶安装 -
Falcon-RX 数据手册

5G xHaul 具备时序感知能力的 O-RAN 交换机与 PTP 授时主时钟
猎鹰-RX 是实现 5G 愿景的关键组成部分。通过提供高容量、低时延的传输能力以及高精度同步,猎鹰RX 能够在电信和企业环境中,支持 5G RAN 以其最优吞吐性能运行。
猎鹰-RX 在单一而强大的平台中,融合了传输(Transport)与授时(Timing)两大领域的领先技术。这两项能力对于 5G 前传(Fronthaul)部署至关重要,同时还支持最新的 O-RAN 架构与相关技术建议。
1. 简介
猎鹰-RX 是实现 5G 愿景的关键组成部分。通过提供高容量、低时延的传输能力以及高精度同步,猎鹰-RX 能够在电信和企业环境中,使 5G RAN 以其最优容量运行。
猎鹰-RX 在一个强大的统一平台中,融合了传输与授时两大领域的领先技术。这两项能力对于 5G 前传部署至关重要,同时还支持最新的 O-RAN 架构与相关技术建议。
猎鹰-RX 的授时工具箱提供了一整套完善的能力,包括基于 GNSS 的 PTP 主时钟 / 边界时钟 / 透明时钟 / 普通时钟(亚纳秒级精度,Class C/D 性能),并结合高可靠的 SyncE 及其他同步接口。系统的授时由 Fibrolan 直观易用的 SyncCenter 进行统一编排和管理。
猎鹰-RX 系列共配备 20 个 SFP+ / SFP28 端口,端口配置灵活,支持最高 200 Gbps 全双工吞吐(交换结构容量 400 Gbps)。所有端口在任意报文长度(包括巨帧)下均可实现线速转发。
猎鹰-RX 提供先进的服务质量(QoS)功能,包括基于第 1 层至第 4 层属性的业务分类与映射、端口与队列级别的限速与整形,以及高度灵活的调度机制。
对时间敏感网络(TSN)的支持,使 猎鹰-RX 不仅非常适合 5G 前传场景,也同样适用于工业环境(工业 4.0、IIoT),在这些场景中,5G 基础设施为工厂自动化提供支撑。
猎鹰-RX 全面支持 O-RAN LLS-C1 至 C4 配置,包括 C/U 面 eCPRI 报文转发,以及用于管理和同步的 S/M 平面。
多种保护机制可覆盖各种部署拓扑(线型、星型、环型),为 5G 等关键基础设施提供所需的高可靠性。此外,系统还支持 三层转发(静态路由,动态路由将在未来软件版本中提供)。
系统内置高效的 OAM 工具,用于对系统本身以及转发平面和同步平面进行监测、告警、分析与故障排查。
猎鹰-RX 采用坚固的 19 英寸 / 1RU 机箱设计,支持安装可热插拔的冗余交流和/或直流电源模块。
2. 主要特性
- LTE/5G xHaul 传输与授时一体化的 RAN 交换机
- 集成 PTP 授时主时钟(Grandmaster)
- 兼容 O-RAN 架构
- 高容量、低时延
- 支持 SyncE 与 PTP 的全面同步与授时能力(PTRC/GM、BC、TC)
- 亚纳秒级时间戳精度,符合 Class C/D 性能等级
- 支持时间敏感网络(TSN)
- 基于第四代 Falcon 架构
- 高级 QoS 与业务等级(SLA)流量管理
- 先进的 OAM 与管理能力
- 提供多种保护机制,保障链路、路径及环网业务的高可靠性
3. 规格
接口与指示 以太网(数据平面): 12 × 1/10G(SFP / SFP+)8 × 1/10/25G(SFP / SFP+ / SFP28)支持的 SFP 类型:多模(MM)、单模(SM)、单纤双向(SFS)、xWDM、铜缆 同步与授时: 所有以太网端口均支持 PTP、SyncE 和 NTPGNSS 天线输入(TNC 接口,有源,5VDC)3 × 外部 1PPS / 10MHz(SMA)ToD / 1PPS(RJ45)BITS(RJ48) 管理接口(带外 OOB): 1 × 10/100/1000BaseT(RJ45)1 × RS232(控制台,RJ45)1 × USB(控制台) 架构与转发 混合式(ASIC + FPGA)硬件架构性能:所有端口、所有帧长均可实现线速转发交换结构容量:400 Gbps(200G 全双工),无阻塞MTU:10K 字节MAC 表容量:32K 地址VLAN:支持 4K 个并发 VLAN运营级桥接:802.1ad(Q-in-Q)私有 VLAN IP 路由: 静态路由动态路由(未来软件版本支持) 时间敏感网络(TSN): 时间感知调度(IEEE 802.1Qbv)帧抢占(IEEE 802.1Qbu、IEEE 802.3br)入方向门控 / 限速 / 校验(IEEE 802.1Qci)gPTP(IEEE 802.1AS)FRER*(IEEE 802.1CB)Cut-through 转发模式 访问控制列表(ACL): L1–L4 ACL 组播: IGMPv3 侦听MLD 侦听最多支持 8K 个组播组 PTP / IEEE 1588 功能: 主时钟(Grandmaster,PRTC)边界时钟(Boundary Clock,Class C/D)普通时钟(Ordinary Clock,主/从)透明时钟(Transparent Clock,Class C/D) 支持的配置文件(Profiles): 电信频率(G.8265.1)电信相位(G.8275.1、G.8275.2)默认(IEEE 1588)AVB(802.1AS)自定义 支持的模式: 单步(1-step)与双步(2-step)二层多播(L2 Multicast)三层 / UDP 单播与多播(L3/UDP Unicast/Multicast)混合传输模式端到端(E2E)与点到点(P2P)时延机制VLAN 标记 从时钟容量: 最多支持 256 个单播从时钟(满包速率)支持 Sync、Delay Request、Announce 的最大报文速率 硬件时间戳: 分辨率小于 1 纳秒 其他授时与同步特性 同步以太网(SyncE): G.8261、G.8262ESMC(G.8264) GNSS: 32 通道多星座支持(GPS、GLONASS、Galileo、北斗) ToD / 1PPS: 输入 / 输出NMEA、G.8271 SyncCenter NTP: 客户端服务器(未来升级为基于硬件的服务器) 外部同步: 输入 / 输出1PPS / 10MHz 本地时钟: 内置 Stratum 3 / 3E 时钟(与型号相关)可选铷原子钟模块(可插拔) 服务质量(QoS) 基于 L1–L4 信息的业务分类按端口 / 队列进行入口限速(Policing)分层整形与调度机制基于优先级的流量控制(802.1Qbb)调度方式:严格优先(Strict)、DWRR 及混合模式4 级丢弃优先级支持 WRED 与尾丢弃(用于拥塞避免,CA)P-bit 与 DSCP 重标记风暴控制:单播(UC)、组播(MC)、广播(BC)QoS 控制列表 保护机制 链路聚合:静态或 LACP线性(路径)保护:G.8031环网保护:G.8032v2FRER —— 面向可靠性的帧复制与消除(P802.1CB)生成树协议:STP、RSTP、MSTP环路保护 OAM 与诊断 IEEE 802.3ah 链路 OAMIEEE 802.1ag CFM(硬件辅助)Ping(IPv4 / IPv6)Traceroute(IPv4 / IPv6)吞吐量测量SFP 诊断(SFF-8472)流量镜像与远程镜像sFlow 管理 接口: CLI:控制台、Telnet、SSHSNMP:v1 / v2c / v3,丰富的 MIBWeb:HTTP / HTTPS管理 VLANIPv6 管理 认证: RADIUS、TACACS+多本地用户用户访问级别(15 级)管理 ACL802.1X(基于端口 / MAC)DHCP 客户端、中继、服务器、侦听(Snooping)链路发现:LLDP、LLDP-MED、CDP 侦听 CPU 子系统: 双核 ARM,主频 1 GHz1 GB DDR,4 GB 闪存 运维: 远程系统升级(TFTP 或 Web)配置上传 / 下载(TFTP 或 Web)基于文本的配置文件 告警: SNMP TrapSyslog(本地与远程服务器)CLI 事件远程温度读取与告警按端口与队列的详细统计信息RMON 电源与环境 双电源冗余设计,支持热插拔交流 / 直流供电:100–240 VAC,50 / 60 Hz 或 125 VDC直流供电:20–60 VDC,ST 接口 功耗: 最大功耗:< 65 W;典型功耗:< 55 W 工作温度: 标准:0°C ~ +50°C(32°F ~ 122°F)扩展:-40°C ~ +65°C(-40°F ~ 149°F) 存储温度: -40°C ~ +80°C(-40°F ~ 176°F) 湿度: 10%~90%,无冷凝 物理参数 尺寸(高 × 宽 × 深): 44 × 440 × 305 mm(1.73 × 17.33 × 12.01 英寸) 安装方式: 桌面式机架式 重量: 约 5.5 kg(12.2 磅) 附件: 电源线RS232 线缆(控制台)USB 线缆(控制台)机架安装套件(含接地) 法规与合规 安全: IEC EN 60950-1CERoHS 电磁兼容(EMC): FCC CFR 47 第 15 部分,B 分部,A 类EN 300 386 V1.3.3(05) 4. 订购信息
型号 料号(Part#) 描述 猎鹰-RX/812/G/A 7160 具备时序感知能力的 xHaul 交换机,12×10G(SFP+)、8×25G(SFP28)端口,高级授时规格,集成 GNSS 接收器,1 个可拆卸交流电源(FPS10012/A) 猎鹰-RX/812/G/D 7161 具备时序感知能力的 xHaul 交换机,12×10G(SFP+)、8×25G(SFP28)端口,高级授时规格,集成 GNSS 接收器,1 个可拆卸直流电源(FPS10012/D) 猎鹰-RX/812/G2/A 7163 具备时序感知能力的 xHaul 交换机,12×10G(SFP+)、8×25G(SFP28)端口,高级授时(+)规格,双频 GNSS 接收器,1 个可拆卸交流电源(FPS10012/A) 猎鹰-RX/812/G2/D 7164 具备时序感知能力的 xHaul 交换机,12×10G(SFP+)、8×25G(SFP28)端口,高级授时(+)规格,双频 GNSS 接收器,1 个可拆卸直流电源(FPS10012/D) FPS10012/A 7106 冗余电源模块,AC/DC(100–240 VAC / 125 VDC),50–60 Hz,100 W FPS10012/D 7107 冗余电源模块,DC(20–60 V),100 W 5. 典型应用:LTE / 5G 前传与回传融合
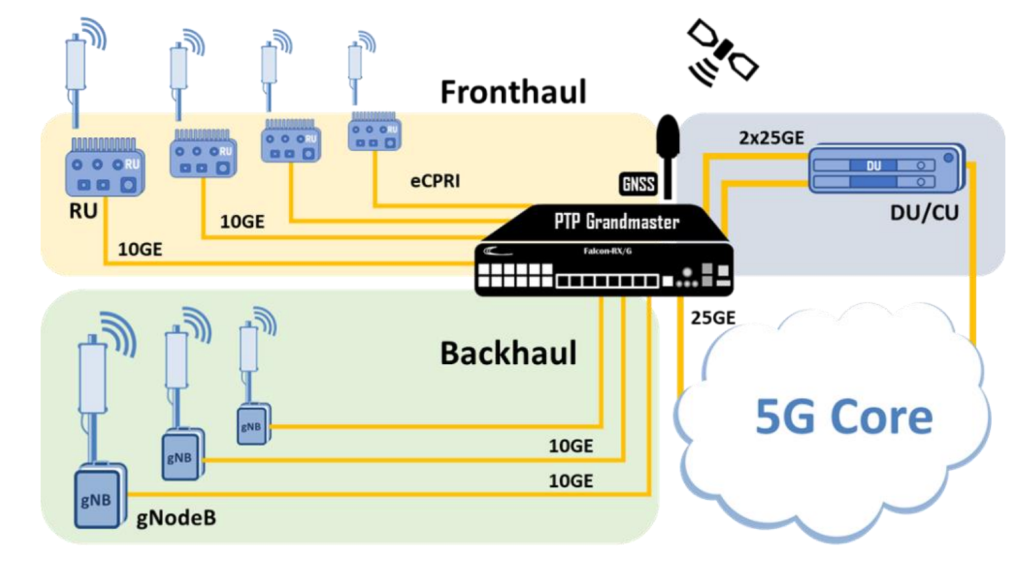
6. 备注:
- 规格如有变更,我们会另行通知
- GNSS 相关附件(天线、线缆等)可选提供,详情请咨询
- 如需获取完整的 猎鹰系列型号列表,请联系东枫科技
- 东枫科技具备进出口资质,报价包含所有相关费用